{"title":"有源声音导航和测距系统中的多通道维纳滤波器--波束成形器和匹配滤波器联合方法","authors":"Bastian Kaulen, Jan Abshagen, Gerhard Schmidt","doi":"10.1049/rsn2.12593","DOIUrl":null,"url":null,"abstract":"<p>Conventional active SONAR systems often use beamformers and matched filters separately to extract bearing and range information from the received signal and offer a straightforward way of creating a two-dimensional map of the environment. In SONAR systems the minimum-variance-distortionless-response beamformer (MVDR beamformer) is a commonly used type of beamformer, which will reconstruct the receive signal from a certain direction optimally. In terms of detecting the transmit signal, the most used method is the conventional matched filter. Both algorithms are simple to implement and perform well under various noise scenarios. The proposed method combines the beamformer and matched filter by introducing an extended channel model that allows the derivation of a multichannel Wiener filter to solve for the unknown reflection coefficients of the complete two-dimensional environment. This results in adaptively calculated filter weights that will drastically improve the performance compared to a separate MVDR beamformer and matched filter. In addition, a parameter is introduced with which one can arbitrarily adjust the focus between angular and temporal resolution depending on the application. After the derivation, the performance is demonstrated with simulations and measurements.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 9","pages":"1554-1569"},"PeriodicalIF":1.4000,"publicationDate":"2024-06-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12593","citationCount":"0","resultStr":"{\"title\":\"Multichannel Wiener filter in active sound-navigation-and-ranging systems—A joint beamformer and matched filter approach\",\"authors\":\"Bastian Kaulen, Jan Abshagen, Gerhard Schmidt\",\"doi\":\"10.1049/rsn2.12593\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Conventional active SONAR systems often use beamformers and matched filters separately to extract bearing and range information from the received signal and offer a straightforward way of creating a two-dimensional map of the environment. In SONAR systems the minimum-variance-distortionless-response beamformer (MVDR beamformer) is a commonly used type of beamformer, which will reconstruct the receive signal from a certain direction optimally. In terms of detecting the transmit signal, the most used method is the conventional matched filter. Both algorithms are simple to implement and perform well under various noise scenarios. The proposed method combines the beamformer and matched filter by introducing an extended channel model that allows the derivation of a multichannel Wiener filter to solve for the unknown reflection coefficients of the complete two-dimensional environment. This results in adaptively calculated filter weights that will drastically improve the performance compared to a separate MVDR beamformer and matched filter. In addition, a parameter is introduced with which one can arbitrarily adjust the focus between angular and temporal resolution depending on the application. After the derivation, the performance is demonstrated with simulations and measurements.</p>\",\"PeriodicalId\":50377,\"journal\":{\"name\":\"Iet Radar Sonar and Navigation\",\"volume\":\"18 9\",\"pages\":\"1554-1569\"},\"PeriodicalIF\":1.4000,\"publicationDate\":\"2024-06-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12593\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iet Radar Sonar and Navigation\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12593\",\"RegionNum\":4,\"RegionCategory\":\"管理学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12593","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Multichannel Wiener filter in active sound-navigation-and-ranging systems—A joint beamformer and matched filter approach
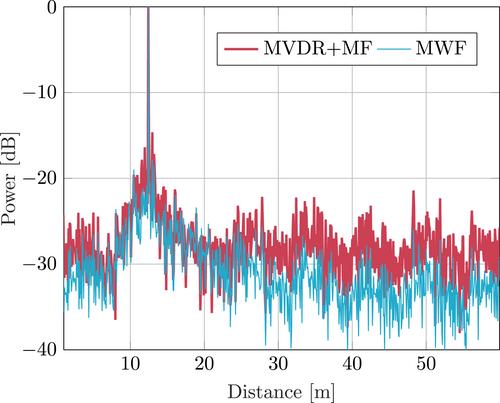
Conventional active SONAR systems often use beamformers and matched filters separately to extract bearing and range information from the received signal and offer a straightforward way of creating a two-dimensional map of the environment. In SONAR systems the minimum-variance-distortionless-response beamformer (MVDR beamformer) is a commonly used type of beamformer, which will reconstruct the receive signal from a certain direction optimally. In terms of detecting the transmit signal, the most used method is the conventional matched filter. Both algorithms are simple to implement and perform well under various noise scenarios. The proposed method combines the beamformer and matched filter by introducing an extended channel model that allows the derivation of a multichannel Wiener filter to solve for the unknown reflection coefficients of the complete two-dimensional environment. This results in adaptively calculated filter weights that will drastically improve the performance compared to a separate MVDR beamformer and matched filter. In addition, a parameter is introduced with which one can arbitrarily adjust the focus between angular and temporal resolution depending on the application. After the derivation, the performance is demonstrated with simulations and measurements.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


