Bo Cheng , Bo Wang , Shujun Chen , Dishan Huang , Bolun Dong
{"title":"基于轴拟合的多关节工业机器人运动学参数测量和识别技术研究","authors":"Bo Cheng , Bo Wang , Shujun Chen , Dishan Huang , Bolun Dong","doi":"10.1016/j.precisioneng.2024.08.013","DOIUrl":null,"url":null,"abstract":"<div><p>To improve the positioning accuracy of industrial robots and meet the requirements of industrial applications, this study begins with the structural design of multi-jointed industrial robots and proposes a kinematic calibration method based on axis fitting. The proposed method introduces an axis fitting technique based on circle fitting. Utilizing the results of the axis fitting, a method for establishing link coordinate systems by referencing the Modified Denavit-Hartenberg (MD-H) model is presented. Subsequently, a kinematic parameter identification method is proposed. This study primarily investigates the impact of joint rotation angles on the accuracy of axis fitting. The study reveals that when the rotation angle is greater than or equal to 20°, the circularity of the circle fitting is less than 0.008 mm, and the planarity is less than 0.01 mm, indicating that the proposed fitting algorithm meets the required precision for small angle rotations. Finally, the positioning accuracy of the target robot is verified according to ISO 9283:1998. After calibration, the positioning accuracy at point P<sub>1</sub> improves from 1.64 mm to 0.46 mm, an enhancement of 71.95 %, which is the most significant improvement. At point P<sub>2</sub>, the positioning accuracy improves from 1.75 mm to 0.69 mm, an enhancement of 60.5 %, which is the least improvement. The advantage of this method lies in its ability to identify kinematic parameters that align with the actual structure of the robot using a simple measurement method, thereby improving the robot's positioning accuracy.</p></div>","PeriodicalId":54589,"journal":{"name":"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology","volume":"91 ","pages":"Pages 1-13"},"PeriodicalIF":3.5000,"publicationDate":"2024-08-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Investigation of axis-fitting-based measurement and identification techniques for kinematic parameters in multi-joint industrial robots\",\"authors\":\"Bo Cheng , Bo Wang , Shujun Chen , Dishan Huang , Bolun Dong\",\"doi\":\"10.1016/j.precisioneng.2024.08.013\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>To improve the positioning accuracy of industrial robots and meet the requirements of industrial applications, this study begins with the structural design of multi-jointed industrial robots and proposes a kinematic calibration method based on axis fitting. The proposed method introduces an axis fitting technique based on circle fitting. Utilizing the results of the axis fitting, a method for establishing link coordinate systems by referencing the Modified Denavit-Hartenberg (MD-H) model is presented. Subsequently, a kinematic parameter identification method is proposed. This study primarily investigates the impact of joint rotation angles on the accuracy of axis fitting. The study reveals that when the rotation angle is greater than or equal to 20°, the circularity of the circle fitting is less than 0.008 mm, and the planarity is less than 0.01 mm, indicating that the proposed fitting algorithm meets the required precision for small angle rotations. Finally, the positioning accuracy of the target robot is verified according to ISO 9283:1998. After calibration, the positioning accuracy at point P<sub>1</sub> improves from 1.64 mm to 0.46 mm, an enhancement of 71.95 %, which is the most significant improvement. At point P<sub>2</sub>, the positioning accuracy improves from 1.75 mm to 0.69 mm, an enhancement of 60.5 %, which is the least improvement. The advantage of this method lies in its ability to identify kinematic parameters that align with the actual structure of the robot using a simple measurement method, thereby improving the robot's positioning accuracy.</p></div>\",\"PeriodicalId\":54589,\"journal\":{\"name\":\"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology\",\"volume\":\"91 \",\"pages\":\"Pages 1-13\"},\"PeriodicalIF\":3.5000,\"publicationDate\":\"2024-08-28\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0141635924001880\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, MANUFACTURING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0141635924001880","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, MANUFACTURING","Score":null,"Total":0}
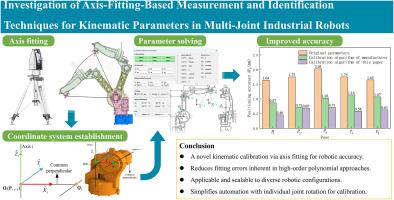
Investigation of axis-fitting-based measurement and identification techniques for kinematic parameters in multi-joint industrial robots
To improve the positioning accuracy of industrial robots and meet the requirements of industrial applications, this study begins with the structural design of multi-jointed industrial robots and proposes a kinematic calibration method based on axis fitting. The proposed method introduces an axis fitting technique based on circle fitting. Utilizing the results of the axis fitting, a method for establishing link coordinate systems by referencing the Modified Denavit-Hartenberg (MD-H) model is presented. Subsequently, a kinematic parameter identification method is proposed. This study primarily investigates the impact of joint rotation angles on the accuracy of axis fitting. The study reveals that when the rotation angle is greater than or equal to 20°, the circularity of the circle fitting is less than 0.008 mm, and the planarity is less than 0.01 mm, indicating that the proposed fitting algorithm meets the required precision for small angle rotations. Finally, the positioning accuracy of the target robot is verified according to ISO 9283:1998. After calibration, the positioning accuracy at point P1 improves from 1.64 mm to 0.46 mm, an enhancement of 71.95 %, which is the most significant improvement. At point P2, the positioning accuracy improves from 1.75 mm to 0.69 mm, an enhancement of 60.5 %, which is the least improvement. The advantage of this method lies in its ability to identify kinematic parameters that align with the actual structure of the robot using a simple measurement method, thereby improving the robot's positioning accuracy.
期刊介绍:
Precision Engineering - Journal of the International Societies for Precision Engineering and Nanotechnology is devoted to the multidisciplinary study and practice of high accuracy engineering, metrology, and manufacturing. The journal takes an integrated approach to all subjects related to research, design, manufacture, performance validation, and application of high precision machines, instruments, and components, including fundamental and applied research and development in manufacturing processes, fabrication technology, and advanced measurement science. The scope includes precision-engineered systems and supporting metrology over the full range of length scales, from atom-based nanotechnology and advanced lithographic technology to large-scale systems, including optical and radio telescopes and macrometrology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


