Juhyeon Kim , Friedrich Y. Lee , Jietae Lee , Joseph Sang-Il Kwon
{"title":"基于扩展线性化方法的非线性二阶加时延模型识别和非线性 PID 控制器调整","authors":"Juhyeon Kim , Friedrich Y. Lee , Jietae Lee , Joseph Sang-Il Kwon","doi":"10.1016/j.conengprac.2024.106044","DOIUrl":null,"url":null,"abstract":"<div><p>PID control systems based on the first order plus time delay model (FOPTD), which approximate the full system dynamics, are well-accepted for a wide range of linear processes. While such controllers can be applied to overdamped nonlinear processes, they often experience excessive overshoots and oscillations for general nonlinear processes. To overcome this limitation, we propose a novel method to design a nonlinear PID controller based on the second order plus time delay (SOPTD) model. The system nonlinearity requires parameter adjustments of the linearized model across operational ranges. Hence, in this work, it is handled by the extended linearization method (ELM), ensuring local stability under the assumptions of slow and small changes in operating points. Importantly, the model achieves global input-to-output stability even without the above constraints, provided there are no structural and parametric errors. The resulting nonlinear SOPTD model can describe changes in process gain and two time constants as the operation point varies. We demonstrate the applicability of our approach with a polymerization reactor simulation and liquid-level control experiments.</p></div>","PeriodicalId":50615,"journal":{"name":"Control Engineering Practice","volume":null,"pages":null},"PeriodicalIF":5.4000,"publicationDate":"2024-08-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Nonlinear second order plus time delay model identification and nonlinear PID controller tuning based on extended linearization method\",\"authors\":\"Juhyeon Kim , Friedrich Y. Lee , Jietae Lee , Joseph Sang-Il Kwon\",\"doi\":\"10.1016/j.conengprac.2024.106044\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>PID control systems based on the first order plus time delay model (FOPTD), which approximate the full system dynamics, are well-accepted for a wide range of linear processes. While such controllers can be applied to overdamped nonlinear processes, they often experience excessive overshoots and oscillations for general nonlinear processes. To overcome this limitation, we propose a novel method to design a nonlinear PID controller based on the second order plus time delay (SOPTD) model. The system nonlinearity requires parameter adjustments of the linearized model across operational ranges. Hence, in this work, it is handled by the extended linearization method (ELM), ensuring local stability under the assumptions of slow and small changes in operating points. Importantly, the model achieves global input-to-output stability even without the above constraints, provided there are no structural and parametric errors. The resulting nonlinear SOPTD model can describe changes in process gain and two time constants as the operation point varies. We demonstrate the applicability of our approach with a polymerization reactor simulation and liquid-level control experiments.</p></div>\",\"PeriodicalId\":50615,\"journal\":{\"name\":\"Control Engineering Practice\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":5.4000,\"publicationDate\":\"2024-08-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Control Engineering Practice\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S096706612400203X\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Control Engineering Practice","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S096706612400203X","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Nonlinear second order plus time delay model identification and nonlinear PID controller tuning based on extended linearization method
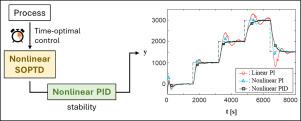
PID control systems based on the first order plus time delay model (FOPTD), which approximate the full system dynamics, are well-accepted for a wide range of linear processes. While such controllers can be applied to overdamped nonlinear processes, they often experience excessive overshoots and oscillations for general nonlinear processes. To overcome this limitation, we propose a novel method to design a nonlinear PID controller based on the second order plus time delay (SOPTD) model. The system nonlinearity requires parameter adjustments of the linearized model across operational ranges. Hence, in this work, it is handled by the extended linearization method (ELM), ensuring local stability under the assumptions of slow and small changes in operating points. Importantly, the model achieves global input-to-output stability even without the above constraints, provided there are no structural and parametric errors. The resulting nonlinear SOPTD model can describe changes in process gain and two time constants as the operation point varies. We demonstrate the applicability of our approach with a polymerization reactor simulation and liquid-level control experiments.
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


