Yifei Yu, Shaocong Wang, Meng Xu, Woyu Zhang, Bo Wang, Jichang Yang, Songqi Wang, Yue Zhang, Xiaoshan Wu, Hegan Chen, Dingchen Wang, Xi Chen, Ning Lin, Xiaojuan Qi, Dashan Shang, Zhongrui Wang
{"title":"基于随机忆阻器的动态图 CNN,实现边缘点云的高效学习","authors":"Yifei Yu, Shaocong Wang, Meng Xu, Woyu Zhang, Bo Wang, Jichang Yang, Songqi Wang, Yue Zhang, Xiaoshan Wu, Hegan Chen, Dingchen Wang, Xi Chen, Ning Lin, Xiaojuan Qi, Dashan Shang, Zhongrui Wang","doi":"10.1038/s44335-024-00006-0","DOIUrl":null,"url":null,"abstract":"The broad integration of 3D sensors into devices like smartphones and AR/VR headsets has led to a surge in 3D data, with point clouds becoming a mainstream representation method. Efficient real-time learning of point cloud data on edge devices is crucial for applications such as autonomous vehicles and embodied AI. Traditional machine learning models on digital processors face limitations, with software challenges like high training complexity, and hardware challenges such as large time and energy overheads due to von Neumann bottleneck. To address this, we propose a software-hardware co-designed random memristor-based dynamic graph CNN (RDGCNN). Software-wise, we transform point cloud into graph, and propose random EdgeConv for efficient hierarchical and topological features extraction. Hardware-wise, leveraging memristor’s intrinsic stochasticity and in-memory computing capability, we achieve significant reductions in training complexity and energy consumption. RDGCNN demonstrates high accuracy and efficiency across various point cloud tasks, paving the way for future edge 3D vision.","PeriodicalId":501715,"journal":{"name":"npj Unconventional Computing","volume":" ","pages":"1-9"},"PeriodicalIF":0.0000,"publicationDate":"2024-08-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s44335-024-00006-0.pdf","citationCount":"0","resultStr":"{\"title\":\"Random memristor-based dynamic graph CNN for efficient point cloud learning at the edge\",\"authors\":\"Yifei Yu, Shaocong Wang, Meng Xu, Woyu Zhang, Bo Wang, Jichang Yang, Songqi Wang, Yue Zhang, Xiaoshan Wu, Hegan Chen, Dingchen Wang, Xi Chen, Ning Lin, Xiaojuan Qi, Dashan Shang, Zhongrui Wang\",\"doi\":\"10.1038/s44335-024-00006-0\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"The broad integration of 3D sensors into devices like smartphones and AR/VR headsets has led to a surge in 3D data, with point clouds becoming a mainstream representation method. Efficient real-time learning of point cloud data on edge devices is crucial for applications such as autonomous vehicles and embodied AI. Traditional machine learning models on digital processors face limitations, with software challenges like high training complexity, and hardware challenges such as large time and energy overheads due to von Neumann bottleneck. To address this, we propose a software-hardware co-designed random memristor-based dynamic graph CNN (RDGCNN). Software-wise, we transform point cloud into graph, and propose random EdgeConv for efficient hierarchical and topological features extraction. Hardware-wise, leveraging memristor’s intrinsic stochasticity and in-memory computing capability, we achieve significant reductions in training complexity and energy consumption. RDGCNN demonstrates high accuracy and efficiency across various point cloud tasks, paving the way for future edge 3D vision.\",\"PeriodicalId\":501715,\"journal\":{\"name\":\"npj Unconventional Computing\",\"volume\":\" \",\"pages\":\"1-9\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-08-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.nature.com/articles/s44335-024-00006-0.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"npj Unconventional Computing\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.nature.com/articles/s44335-024-00006-0\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"npj Unconventional Computing","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44335-024-00006-0","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
摘要
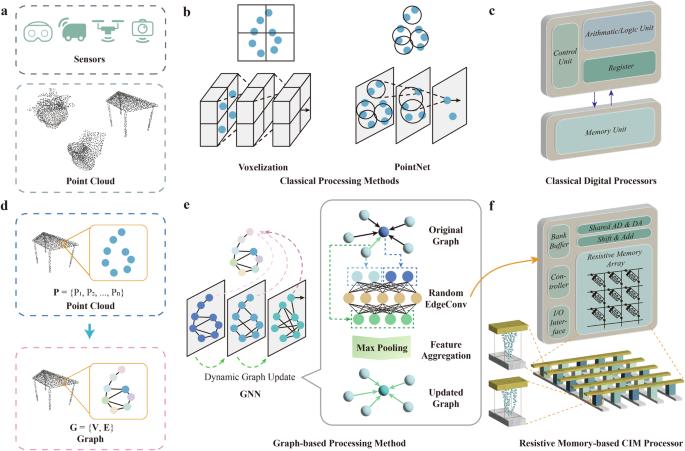
三维传感器广泛集成到智能手机和 AR/VR 头显等设备中,导致三维数据激增,点云成为主流表示方法。在边缘设备上对点云数据进行高效的实时学习对于自动驾驶汽车和嵌入式人工智能等应用至关重要。数字处理器上的传统机器学习模型面临诸多限制,软件方面的挑战包括训练复杂度高,硬件方面的挑战包括冯-诺依曼瓶颈导致的大量时间和能源开销。为此,我们提出了一种软硬件协同设计的基于随机忆阻器的动态图 CNN(RDGCN)。在软件方面,我们将点云转换为图,并提出了随机 EdgeConv 以实现高效的层次和拓扑特征提取。在硬件方面,我们利用忆阻器固有的随机性和内存计算能力,显著降低了训练复杂度和能耗。RDGCNN 在各种点云任务中都表现出了高精度和高效率,为未来的边缘 3D 视觉铺平了道路。
Random memristor-based dynamic graph CNN for efficient point cloud learning at the edge
The broad integration of 3D sensors into devices like smartphones and AR/VR headsets has led to a surge in 3D data, with point clouds becoming a mainstream representation method. Efficient real-time learning of point cloud data on edge devices is crucial for applications such as autonomous vehicles and embodied AI. Traditional machine learning models on digital processors face limitations, with software challenges like high training complexity, and hardware challenges such as large time and energy overheads due to von Neumann bottleneck. To address this, we propose a software-hardware co-designed random memristor-based dynamic graph CNN (RDGCNN). Software-wise, we transform point cloud into graph, and propose random EdgeConv for efficient hierarchical and topological features extraction. Hardware-wise, leveraging memristor’s intrinsic stochasticity and in-memory computing capability, we achieve significant reductions in training complexity and energy consumption. RDGCNN demonstrates high accuracy and efficiency across various point cloud tasks, paving the way for future edge 3D vision.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


