{"title":"基于 MPC 和 ANFIS 的地面移动机器人轨迹跟踪控制研究","authors":"Yulong You , Zhong Yang , Hao-ze Zhuo , Yaoyu Sui","doi":"10.1016/j.conengprac.2024.106040","DOIUrl":null,"url":null,"abstract":"<div><p>This study focuses on the control strategy for a ground mobile robot (GMR) with independent three-axis six-wheel drive and four-wheel independent steering, performing double lane change trajectory tracking in complex scenarios. Initially, a dynamic model of the six-wheel independent drive and steering GMR was constructed. Utilizing Model Predictive Control (MPC) technology, the challenge of trajectory tracking at low speeds was effectively addressed. For high-speed conditions, by thoroughly analyzing the impact of the predictive time-domain, this study innovatively introduced an Adaptive Neuro-Fuzzy Inference System (ANFIS) to dynamically adjust the prediction horizon of the MPC. A novel trajectory tracking algorithm integrating MPC and ANFIS was developed, with the network structure being trained using backpropagation (BP) method and the least squares method. Compared to traditional MPC, this hybrid strategy significantly improves trajectory tracking accuracy and stability at high speeds, with computational efficiency increased by 48.65%. Additionally, the algorithm demonstrated excellent adaptability and control effectiveness in various rigorous tests, including different speed levels, complex steering paths, load changes, sudden obstacles, and variable terrain. A 70 km/h trajectory tracking experiment on a physical vehicle yielded a root mean square (RMS) error of 0.1904 m, verifying its superior tracking performance and practical reliability. This provides a pioneering solution for high-performance trajectory control of ground mobile robots.</p></div>","PeriodicalId":50615,"journal":{"name":"Control Engineering Practice","volume":null,"pages":null},"PeriodicalIF":5.4000,"publicationDate":"2024-08-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Research on ground mobile robot trajectory tracking control based on MPC and ANFIS\",\"authors\":\"Yulong You , Zhong Yang , Hao-ze Zhuo , Yaoyu Sui\",\"doi\":\"10.1016/j.conengprac.2024.106040\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>This study focuses on the control strategy for a ground mobile robot (GMR) with independent three-axis six-wheel drive and four-wheel independent steering, performing double lane change trajectory tracking in complex scenarios. Initially, a dynamic model of the six-wheel independent drive and steering GMR was constructed. Utilizing Model Predictive Control (MPC) technology, the challenge of trajectory tracking at low speeds was effectively addressed. For high-speed conditions, by thoroughly analyzing the impact of the predictive time-domain, this study innovatively introduced an Adaptive Neuro-Fuzzy Inference System (ANFIS) to dynamically adjust the prediction horizon of the MPC. A novel trajectory tracking algorithm integrating MPC and ANFIS was developed, with the network structure being trained using backpropagation (BP) method and the least squares method. Compared to traditional MPC, this hybrid strategy significantly improves trajectory tracking accuracy and stability at high speeds, with computational efficiency increased by 48.65%. Additionally, the algorithm demonstrated excellent adaptability and control effectiveness in various rigorous tests, including different speed levels, complex steering paths, load changes, sudden obstacles, and variable terrain. A 70 km/h trajectory tracking experiment on a physical vehicle yielded a root mean square (RMS) error of 0.1904 m, verifying its superior tracking performance and practical reliability. This provides a pioneering solution for high-performance trajectory control of ground mobile robots.</p></div>\",\"PeriodicalId\":50615,\"journal\":{\"name\":\"Control Engineering Practice\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":5.4000,\"publicationDate\":\"2024-08-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Control Engineering Practice\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0967066124001990\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Control Engineering Practice","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0967066124001990","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Research on ground mobile robot trajectory tracking control based on MPC and ANFIS
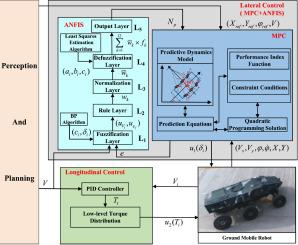
This study focuses on the control strategy for a ground mobile robot (GMR) with independent three-axis six-wheel drive and four-wheel independent steering, performing double lane change trajectory tracking in complex scenarios. Initially, a dynamic model of the six-wheel independent drive and steering GMR was constructed. Utilizing Model Predictive Control (MPC) technology, the challenge of trajectory tracking at low speeds was effectively addressed. For high-speed conditions, by thoroughly analyzing the impact of the predictive time-domain, this study innovatively introduced an Adaptive Neuro-Fuzzy Inference System (ANFIS) to dynamically adjust the prediction horizon of the MPC. A novel trajectory tracking algorithm integrating MPC and ANFIS was developed, with the network structure being trained using backpropagation (BP) method and the least squares method. Compared to traditional MPC, this hybrid strategy significantly improves trajectory tracking accuracy and stability at high speeds, with computational efficiency increased by 48.65%. Additionally, the algorithm demonstrated excellent adaptability and control effectiveness in various rigorous tests, including different speed levels, complex steering paths, load changes, sudden obstacles, and variable terrain. A 70 km/h trajectory tracking experiment on a physical vehicle yielded a root mean square (RMS) error of 0.1904 m, verifying its superior tracking performance and practical reliability. This provides a pioneering solution for high-performance trajectory control of ground mobile robots.
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


