Nikita V. Belikov , Irina V. Khaydukova , Ilya E. Poludkin , Anna S. Borde
{"title":"用于血管内手术的机器人导管的发展和现状:全面回顾","authors":"Nikita V. Belikov , Irina V. Khaydukova , Ilya E. Poludkin , Anna S. Borde","doi":"10.1016/j.jestch.2024.101789","DOIUrl":null,"url":null,"abstract":"<div><p>For the past decade, a number of robotic catheters have been developed for precise and repeatable insertion of endovascular catheters and guidewires. However, using the existing descriptions of a variety of designs and functions it is impossible to systematically evaluate the development of robotic catheters and follow their modifications that lead to improvements in their performance. This systematic literature review focuses on the evolution of robotic catheters in order to define the current results and trends in this field. We have followed the PRISMA guidelines and conducted a comprehensive search of publications reporting design and feasibility tests from January 2011 to December 2023 in the Google Scholar database. The evolution of each model was described in terms of the implemented mechanisms and features. The accuracy, ranges of motion and speed of robotic catheters were compared. The most common number of degrees of freedom of the slave unit of robotic catheters is 2-3. Robotic catheters usually have unlimited translation and rotation ranges, and the speed range varies from 2 to 20 mm/s for translation and from 8 °/s to 20 °/s or from 50 °/s to 70 °/s for rotation. The major part of robotic catheters has the maximum translational trueness between 0.5 and 1.1 mm, and the maximum rotational trueness is between 0.8°and 1.2°, which is enough to execute a precise endovascular procedure. No commercially available robotic catheter has force feedback, however, many of the catheters are developing various elements for it, which suggests that such systems will appear in the future.</p></div>","PeriodicalId":48609,"journal":{"name":"Engineering Science and Technology-An International Journal-Jestech","volume":"57 ","pages":"Article 101789"},"PeriodicalIF":5.4000,"publicationDate":"2024-08-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2215098624001757/pdfft?md5=0986d429f8edbbf79e1f66773737fb2b&pid=1-s2.0-S2215098624001757-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Evolution and current state of robotic catheters for endovascular surgery: A comprehensive review\",\"authors\":\"Nikita V. Belikov , Irina V. Khaydukova , Ilya E. Poludkin , Anna S. Borde\",\"doi\":\"10.1016/j.jestch.2024.101789\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>For the past decade, a number of robotic catheters have been developed for precise and repeatable insertion of endovascular catheters and guidewires. However, using the existing descriptions of a variety of designs and functions it is impossible to systematically evaluate the development of robotic catheters and follow their modifications that lead to improvements in their performance. This systematic literature review focuses on the evolution of robotic catheters in order to define the current results and trends in this field. We have followed the PRISMA guidelines and conducted a comprehensive search of publications reporting design and feasibility tests from January 2011 to December 2023 in the Google Scholar database. The evolution of each model was described in terms of the implemented mechanisms and features. The accuracy, ranges of motion and speed of robotic catheters were compared. The most common number of degrees of freedom of the slave unit of robotic catheters is 2-3. Robotic catheters usually have unlimited translation and rotation ranges, and the speed range varies from 2 to 20 mm/s for translation and from 8 °/s to 20 °/s or from 50 °/s to 70 °/s for rotation. The major part of robotic catheters has the maximum translational trueness between 0.5 and 1.1 mm, and the maximum rotational trueness is between 0.8°and 1.2°, which is enough to execute a precise endovascular procedure. No commercially available robotic catheter has force feedback, however, many of the catheters are developing various elements for it, which suggests that such systems will appear in the future.</p></div>\",\"PeriodicalId\":48609,\"journal\":{\"name\":\"Engineering Science and Technology-An International Journal-Jestech\",\"volume\":\"57 \",\"pages\":\"Article 101789\"},\"PeriodicalIF\":5.4000,\"publicationDate\":\"2024-08-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2215098624001757/pdfft?md5=0986d429f8edbbf79e1f66773737fb2b&pid=1-s2.0-S2215098624001757-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Engineering Science and Technology-An International Journal-Jestech\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2215098624001757\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Science and Technology-An International Journal-Jestech","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2215098624001757","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
Evolution and current state of robotic catheters for endovascular surgery: A comprehensive review
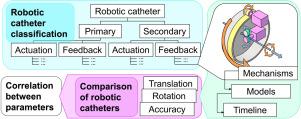
For the past decade, a number of robotic catheters have been developed for precise and repeatable insertion of endovascular catheters and guidewires. However, using the existing descriptions of a variety of designs and functions it is impossible to systematically evaluate the development of robotic catheters and follow their modifications that lead to improvements in their performance. This systematic literature review focuses on the evolution of robotic catheters in order to define the current results and trends in this field. We have followed the PRISMA guidelines and conducted a comprehensive search of publications reporting design and feasibility tests from January 2011 to December 2023 in the Google Scholar database. The evolution of each model was described in terms of the implemented mechanisms and features. The accuracy, ranges of motion and speed of robotic catheters were compared. The most common number of degrees of freedom of the slave unit of robotic catheters is 2-3. Robotic catheters usually have unlimited translation and rotation ranges, and the speed range varies from 2 to 20 mm/s for translation and from 8 °/s to 20 °/s or from 50 °/s to 70 °/s for rotation. The major part of robotic catheters has the maximum translational trueness between 0.5 and 1.1 mm, and the maximum rotational trueness is between 0.8°and 1.2°, which is enough to execute a precise endovascular procedure. No commercially available robotic catheter has force feedback, however, many of the catheters are developing various elements for it, which suggests that such systems will appear in the future.
期刊介绍:
Engineering Science and Technology, an International Journal (JESTECH) (formerly Technology), a peer-reviewed quarterly engineering journal, publishes both theoretical and experimental high quality papers of permanent interest, not previously published in journals, in the field of engineering and applied science which aims to promote the theory and practice of technology and engineering. In addition to peer-reviewed original research papers, the Editorial Board welcomes original research reports, state-of-the-art reviews and communications in the broadly defined field of engineering science and technology.
The scope of JESTECH includes a wide spectrum of subjects including:
-Electrical/Electronics and Computer Engineering (Biomedical Engineering and Instrumentation; Coding, Cryptography, and Information Protection; Communications, Networks, Mobile Computing and Distributed Systems; Compilers and Operating Systems; Computer Architecture, Parallel Processing, and Dependability; Computer Vision and Robotics; Control Theory; Electromagnetic Waves, Microwave Techniques and Antennas; Embedded Systems; Integrated Circuits, VLSI Design, Testing, and CAD; Microelectromechanical Systems; Microelectronics, and Electronic Devices and Circuits; Power, Energy and Energy Conversion Systems; Signal, Image, and Speech Processing)
-Mechanical and Civil Engineering (Automotive Technologies; Biomechanics; Construction Materials; Design and Manufacturing; Dynamics and Control; Energy Generation, Utilization, Conversion, and Storage; Fluid Mechanics and Hydraulics; Heat and Mass Transfer; Micro-Nano Sciences; Renewable and Sustainable Energy Technologies; Robotics and Mechatronics; Solid Mechanics and Structure; Thermal Sciences)
-Metallurgical and Materials Engineering (Advanced Materials Science; Biomaterials; Ceramic and Inorgnanic Materials; Electronic-Magnetic Materials; Energy and Environment; Materials Characterizastion; Metallurgy; Polymers and Nanocomposites)

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


