{"title":"基于光纤形状传感的伞形天线径向肋片闭环主动形状控制","authors":"Yuhang Qie, Shujun Tan, Maoqi Wu, Feixiong Gao, Junchao Guo","doi":"10.1007/s00707-024-04033-7","DOIUrl":null,"url":null,"abstract":"<div><p>Radial ribs are important supporting parts of umbrella antenna, and its shape is a crucial factor affecting the overall reflector accuracy. Considering the difficulty of in-orbit shape sensing, a fiber-optic shape sensing (FOSS) method for the radial rib is presented in this paper, then on the basis of FOSS a shape active control method for the radial rib driven by Macro-Fiber Composite actuators is proposed. Firstly, combining the deformation characteristics of the radial rib structure, an improved Ko displacement algorithm is proposed for its shape sensing using distributed fiber-optic. Then, establish the shape active control model with the Influence-Coefficient-Matrix method, and propose a closed-loop shape active control method with FOSS as feedback for the radial rib. In this paper, the optimization problem of solving control voltage is established by using the Least-Square method, and Root-Mean-Square error is taken as the convergence condition. Finally, numerical simulation and experiment show that the relative error of the shape sensing with fiber-optic is less than 5%, and the shape accuracy of radial rib after control is improved by more than 90% to reach submillimeter level, which verifies the effectiveness of the radial rib shape active control method based on FOSS.</p></div>","PeriodicalId":456,"journal":{"name":"Acta Mechanica","volume":"235 10","pages":"6225 - 6248"},"PeriodicalIF":2.3000,"publicationDate":"2024-08-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Closed-loop active shape control of radial rib in umbrella antenna based on fiber-optic shape sensing\",\"authors\":\"Yuhang Qie, Shujun Tan, Maoqi Wu, Feixiong Gao, Junchao Guo\",\"doi\":\"10.1007/s00707-024-04033-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Radial ribs are important supporting parts of umbrella antenna, and its shape is a crucial factor affecting the overall reflector accuracy. Considering the difficulty of in-orbit shape sensing, a fiber-optic shape sensing (FOSS) method for the radial rib is presented in this paper, then on the basis of FOSS a shape active control method for the radial rib driven by Macro-Fiber Composite actuators is proposed. Firstly, combining the deformation characteristics of the radial rib structure, an improved Ko displacement algorithm is proposed for its shape sensing using distributed fiber-optic. Then, establish the shape active control model with the Influence-Coefficient-Matrix method, and propose a closed-loop shape active control method with FOSS as feedback for the radial rib. In this paper, the optimization problem of solving control voltage is established by using the Least-Square method, and Root-Mean-Square error is taken as the convergence condition. Finally, numerical simulation and experiment show that the relative error of the shape sensing with fiber-optic is less than 5%, and the shape accuracy of radial rib after control is improved by more than 90% to reach submillimeter level, which verifies the effectiveness of the radial rib shape active control method based on FOSS.</p></div>\",\"PeriodicalId\":456,\"journal\":{\"name\":\"Acta Mechanica\",\"volume\":\"235 10\",\"pages\":\"6225 - 6248\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-08-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Acta Mechanica\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s00707-024-04033-7\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"MECHANICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Acta Mechanica","FirstCategoryId":"5","ListUrlMain":"https://link.springer.com/article/10.1007/s00707-024-04033-7","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
Closed-loop active shape control of radial rib in umbrella antenna based on fiber-optic shape sensing
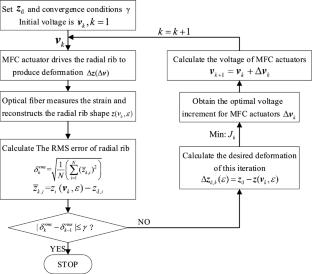
Radial ribs are important supporting parts of umbrella antenna, and its shape is a crucial factor affecting the overall reflector accuracy. Considering the difficulty of in-orbit shape sensing, a fiber-optic shape sensing (FOSS) method for the radial rib is presented in this paper, then on the basis of FOSS a shape active control method for the radial rib driven by Macro-Fiber Composite actuators is proposed. Firstly, combining the deformation characteristics of the radial rib structure, an improved Ko displacement algorithm is proposed for its shape sensing using distributed fiber-optic. Then, establish the shape active control model with the Influence-Coefficient-Matrix method, and propose a closed-loop shape active control method with FOSS as feedback for the radial rib. In this paper, the optimization problem of solving control voltage is established by using the Least-Square method, and Root-Mean-Square error is taken as the convergence condition. Finally, numerical simulation and experiment show that the relative error of the shape sensing with fiber-optic is less than 5%, and the shape accuracy of radial rib after control is improved by more than 90% to reach submillimeter level, which verifies the effectiveness of the radial rib shape active control method based on FOSS.
期刊介绍:
Since 1965, the international journal Acta Mechanica has been among the leading journals in the field of theoretical and applied mechanics. In addition to the classical fields such as elasticity, plasticity, vibrations, rigid body dynamics, hydrodynamics, and gasdynamics, it also gives special attention to recently developed areas such as non-Newtonian fluid dynamics, micro/nano mechanics, smart materials and structures, and issues at the interface of mechanics and materials. The journal further publishes papers in such related fields as rheology, thermodynamics, and electromagnetic interactions with fluids and solids. In addition, articles in applied mathematics dealing with significant mechanics problems are also welcome.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


