{"title":"具有定向充气、双侧弯曲和自感应功能的纱线编织软机器人,可用于医疗保健领域","authors":"","doi":"10.1016/j.xcrp.2024.102137","DOIUrl":null,"url":null,"abstract":"<p>Pneumatic soft robotics are highly desirable for interacting with humans and navigating uncertain environments. However, it remains a great challenge to simultaneously achieve high actuation efficiency, programmable deformations, real-time feedback, and robustness. Herein, a textile engineering approach is harnessed to integrate multifunctionality into woven actuators by tailoring yarn groupings using all-in-one industrial weaving technologies. The unique nearly zero Poisson’s ratio inflatable deformation of the actuators contributes to a large bending strain (2,250° m<sup>−1</sup>), a high output force (30 N MPa<sup>−1</sup>), and robust mechanical performance. Bilateral bending actuators with negative, zero, and positive curvatures are realized by hierarchical shape transformations of the woven layers. The embedded sensing yarns provide facile and effective methods to proprioceptively sense actuation deformation without compromising actuation performance. Moreover, this manufacturing method is cost efficient and highly scalable, which expands practical applications of soft actuators in healthcare and offers a new perspective on the structure design of customized soft actuators.</p>","PeriodicalId":9703,"journal":{"name":"Cell Reports Physical Science","volume":"98 1","pages":""},"PeriodicalIF":7.3000,"publicationDate":"2024-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Yarn-grouping weaving soft robotics with directional inflation, bilateral bending, and self-sensing for healthcare\",\"authors\":\"\",\"doi\":\"10.1016/j.xcrp.2024.102137\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Pneumatic soft robotics are highly desirable for interacting with humans and navigating uncertain environments. However, it remains a great challenge to simultaneously achieve high actuation efficiency, programmable deformations, real-time feedback, and robustness. Herein, a textile engineering approach is harnessed to integrate multifunctionality into woven actuators by tailoring yarn groupings using all-in-one industrial weaving technologies. The unique nearly zero Poisson’s ratio inflatable deformation of the actuators contributes to a large bending strain (2,250° m<sup>−1</sup>), a high output force (30 N MPa<sup>−1</sup>), and robust mechanical performance. Bilateral bending actuators with negative, zero, and positive curvatures are realized by hierarchical shape transformations of the woven layers. The embedded sensing yarns provide facile and effective methods to proprioceptively sense actuation deformation without compromising actuation performance. Moreover, this manufacturing method is cost efficient and highly scalable, which expands practical applications of soft actuators in healthcare and offers a new perspective on the structure design of customized soft actuators.</p>\",\"PeriodicalId\":9703,\"journal\":{\"name\":\"Cell Reports Physical Science\",\"volume\":\"98 1\",\"pages\":\"\"},\"PeriodicalIF\":7.3000,\"publicationDate\":\"2024-08-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cell Reports Physical Science\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1016/j.xcrp.2024.102137\",\"RegionNum\":2,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cell Reports Physical Science","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1016/j.xcrp.2024.102137","RegionNum":2,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
摘要
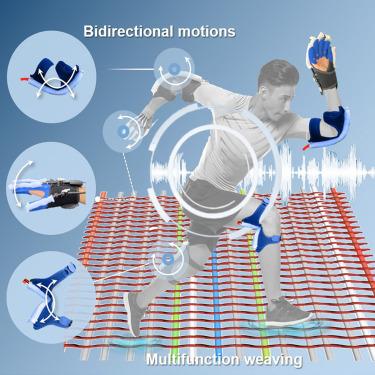
气动软机器人技术在与人类互动和在不确定环境中导航方面非常理想。然而,同时实现高传动效率、可编程变形、实时反馈和鲁棒性仍然是一项巨大挑战。在此,我们利用纺织工程方法,通过一体化工业编织技术定制纱线组,将多功能性集成到编织致动器中。致动器独特的近零泊松比充气变形有助于实现大弯曲应变(2,250° m-1)、高输出力(30 N MPa-1)和稳健的机械性能。通过编织层的分层形状变换,实现了具有负曲率、零曲率和正曲率的双侧弯曲致动器。嵌入式传感纱线为本体感知致动器变形提供了简便有效的方法,同时不会影响致动器的性能。此外,这种制造方法还具有成本效益和高度可扩展性,从而扩大了软致动器在医疗保健领域的实际应用,并为定制软致动器的结构设计提供了新的视角。
Yarn-grouping weaving soft robotics with directional inflation, bilateral bending, and self-sensing for healthcare
Pneumatic soft robotics are highly desirable for interacting with humans and navigating uncertain environments. However, it remains a great challenge to simultaneously achieve high actuation efficiency, programmable deformations, real-time feedback, and robustness. Herein, a textile engineering approach is harnessed to integrate multifunctionality into woven actuators by tailoring yarn groupings using all-in-one industrial weaving technologies. The unique nearly zero Poisson’s ratio inflatable deformation of the actuators contributes to a large bending strain (2,250° m−1), a high output force (30 N MPa−1), and robust mechanical performance. Bilateral bending actuators with negative, zero, and positive curvatures are realized by hierarchical shape transformations of the woven layers. The embedded sensing yarns provide facile and effective methods to proprioceptively sense actuation deformation without compromising actuation performance. Moreover, this manufacturing method is cost efficient and highly scalable, which expands practical applications of soft actuators in healthcare and offers a new perspective on the structure design of customized soft actuators.
期刊介绍:
Cell Reports Physical Science, a premium open-access journal from Cell Press, features high-quality, cutting-edge research spanning the physical sciences. It serves as an open forum fostering collaboration among physical scientists while championing open science principles. Published works must signify significant advancements in fundamental insight or technological applications within fields such as chemistry, physics, materials science, energy science, engineering, and related interdisciplinary studies. In addition to longer articles, the journal considers impactful short-form reports and short reviews covering recent literature in emerging fields. Continually adapting to the evolving open science landscape, the journal reviews its policies to align with community consensus and best practices.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


