Maorong Zheng , Mingyuan Liu , Yin Cheng , Wenjing Chen , Liming Wang , Xiaohong Qin
{"title":"用于智能软机器人的刺激响应型纤维/织物致动器:从当前进展到未来机遇","authors":"Maorong Zheng , Mingyuan Liu , Yin Cheng , Wenjing Chen , Liming Wang , Xiaohong Qin","doi":"10.1016/j.nanoen.2024.110050","DOIUrl":null,"url":null,"abstract":"<div><p>Bioinspired soft actuators with adaptive, reconfigurable, and multifunctional features have gained increasing attention in soft-robotic applications of intelligent responsive devices. Fueled by the development of wearable electronics, fiber/fabric actuators are of particular interest owing to their unique characteristics of mechanical flexibility/stretchability, high degree-of-freedom morphing, body-compatible shape factor, and mature industrial producing. In this review, the state-of-arts of fiber/fabric-based actuators and soft-robotic systems including preparations, structures, stimulating mechanisms, and functional applications are comprehensively investigated. The analysis of advantages and disadvantages in practical actuation scenarios is highlighted, starting from the introduction of the fabrication routes and typical structural designs. Furthermore, the actuating mechanisms of fiber/fabric-based robots are examined in terms of the key stimulus types (single/multiple stimulating schemes), and the wide spectrum of application fields are illustrated: namely, smart clothing, artificial muscles, intelligent devices, and flexible electronics. Finally, the challenges and opportunities for next-generation fiber/fabric-based actuators/robots are discussed in terms of manufacturing scalability for pervasive use, multifunctionality for enhanced adaptability, and self-healability/degradability for recyclable design.</p></div>","PeriodicalId":394,"journal":{"name":"Nano Energy","volume":"129 ","pages":"Article 110050"},"PeriodicalIF":16.8000,"publicationDate":"2024-07-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Stimuli-responsive fiber/fabric actuators for intelligent soft robots: From current progress to future opportunities\",\"authors\":\"Maorong Zheng , Mingyuan Liu , Yin Cheng , Wenjing Chen , Liming Wang , Xiaohong Qin\",\"doi\":\"10.1016/j.nanoen.2024.110050\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Bioinspired soft actuators with adaptive, reconfigurable, and multifunctional features have gained increasing attention in soft-robotic applications of intelligent responsive devices. Fueled by the development of wearable electronics, fiber/fabric actuators are of particular interest owing to their unique characteristics of mechanical flexibility/stretchability, high degree-of-freedom morphing, body-compatible shape factor, and mature industrial producing. In this review, the state-of-arts of fiber/fabric-based actuators and soft-robotic systems including preparations, structures, stimulating mechanisms, and functional applications are comprehensively investigated. The analysis of advantages and disadvantages in practical actuation scenarios is highlighted, starting from the introduction of the fabrication routes and typical structural designs. Furthermore, the actuating mechanisms of fiber/fabric-based robots are examined in terms of the key stimulus types (single/multiple stimulating schemes), and the wide spectrum of application fields are illustrated: namely, smart clothing, artificial muscles, intelligent devices, and flexible electronics. Finally, the challenges and opportunities for next-generation fiber/fabric-based actuators/robots are discussed in terms of manufacturing scalability for pervasive use, multifunctionality for enhanced adaptability, and self-healability/degradability for recyclable design.</p></div>\",\"PeriodicalId\":394,\"journal\":{\"name\":\"Nano Energy\",\"volume\":\"129 \",\"pages\":\"Article 110050\"},\"PeriodicalIF\":16.8000,\"publicationDate\":\"2024-07-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nano Energy\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2211285524008000\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, PHYSICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nano Energy","FirstCategoryId":"88","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2211285524008000","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
Stimuli-responsive fiber/fabric actuators for intelligent soft robots: From current progress to future opportunities
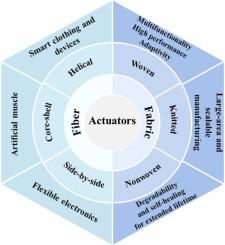
Bioinspired soft actuators with adaptive, reconfigurable, and multifunctional features have gained increasing attention in soft-robotic applications of intelligent responsive devices. Fueled by the development of wearable electronics, fiber/fabric actuators are of particular interest owing to their unique characteristics of mechanical flexibility/stretchability, high degree-of-freedom morphing, body-compatible shape factor, and mature industrial producing. In this review, the state-of-arts of fiber/fabric-based actuators and soft-robotic systems including preparations, structures, stimulating mechanisms, and functional applications are comprehensively investigated. The analysis of advantages and disadvantages in practical actuation scenarios is highlighted, starting from the introduction of the fabrication routes and typical structural designs. Furthermore, the actuating mechanisms of fiber/fabric-based robots are examined in terms of the key stimulus types (single/multiple stimulating schemes), and the wide spectrum of application fields are illustrated: namely, smart clothing, artificial muscles, intelligent devices, and flexible electronics. Finally, the challenges and opportunities for next-generation fiber/fabric-based actuators/robots are discussed in terms of manufacturing scalability for pervasive use, multifunctionality for enhanced adaptability, and self-healability/degradability for recyclable design.
期刊介绍:
Nano Energy is a multidisciplinary, rapid-publication forum of original peer-reviewed contributions on the science and engineering of nanomaterials and nanodevices used in all forms of energy harvesting, conversion, storage, utilization and policy. Through its mixture of articles, reviews, communications, research news, and information on key developments, Nano Energy provides a comprehensive coverage of this exciting and dynamic field which joins nanoscience and nanotechnology with energy science. The journal is relevant to all those who are interested in nanomaterials solutions to the energy problem.
Nano Energy publishes original experimental and theoretical research on all aspects of energy-related research which utilizes nanomaterials and nanotechnology. Manuscripts of four types are considered: review articles which inform readers of the latest research and advances in energy science; rapid communications which feature exciting research breakthroughs in the field; full-length articles which report comprehensive research developments; and news and opinions which comment on topical issues or express views on the developments in related fields.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


