{"title":"工艺设备控制中二阶加死区时间系统的高效参数估计","authors":"Mahua Pal, Kumardeb Banerjee, Bivas Dam","doi":"10.1002/adc2.229","DOIUrl":null,"url":null,"abstract":"<p>Designing a controller for a process plant typically modeled as a first or second-order system with dead time involves an efficient and accurate estimation of its parameters. Since many process plants are characterized as second-order plus dead time (SOPDT) overdamped or critically damped systems, this study presents a straightforward parameter estimation method using transient response data from a step input at three specific time instants. Two-time domain performance indices (PIs), <span></span><math>\n <mrow>\n <msub>\n <mi>T</mi>\n <mi>R</mi>\n </msub>\n </mrow></math> (= <span></span><math>\n <mrow>\n <mfrac>\n <msub>\n <mi>t</mi>\n <mn>90</mn>\n </msub>\n <msub>\n <mi>t</mi>\n <mn>10</mn>\n </msub>\n </mfrac>\n </mrow></math> for system dead time = 0 and <span></span><math>\n <mrow>\n <mfrac>\n <mrow>\n <msub>\n <mi>t</mi>\n <mn>90</mn>\n </msub>\n <mo>−</mo>\n <msub>\n <mi>t</mi>\n <mn>5</mn>\n </msub>\n <mspace></mspace>\n </mrow>\n <mrow>\n <msub>\n <mi>t</mi>\n <mn>10</mn>\n </msub>\n <mo>−</mo>\n <msub>\n <mi>t</mi>\n <mn>5</mn>\n </msub>\n <mspace></mspace>\n </mrow>\n </mfrac>\n </mrow></math> for system dead time ≠ 0; <span></span><math>\n <mrow>\n <msub>\n <mi>t</mi>\n <mn>5</mn>\n </msub>\n </mrow></math>, <span></span><math>\n <mrow>\n <msub>\n <mi>t</mi>\n <mn>10</mn>\n </msub>\n </mrow></math> and <span></span><math>\n <mrow>\n <msub>\n <mi>t</mi>\n <mn>90</mn>\n </msub>\n </mrow></math> are respectively the times at which the response reaches 5%, 10% and 90% of the steady-state response) and <span></span><math>\n <mrow>\n <msub>\n <mi>f</mi>\n <mi>r</mi>\n </msub>\n </mrow></math> (reciprocal of rise time <span></span><math>\n <mrow>\n <msub>\n <mi>t</mi>\n <mi>r</mi>\n </msub>\n </mrow></math>) are proposed in this work. Correlations are established between these PIs and the parameters of the SOPDT system. The first correlation establishes that <span></span><math>\n <mrow>\n <msub>\n <mi>T</mi>\n <mi>R</mi>\n </msub>\n </mrow></math> is a function of the damping ratio <span></span><math>\n <mrow>\n <mi>ξ</mi>\n </mrow></math> only and is independent of the undamped natural frequency <span></span><math>\n <mrow>\n <mspace></mspace>\n <msub>\n <mi>ω</mi>\n <mi>n</mi>\n </msub>\n <mo>,</mo>\n </mrow></math> which means that the evaluation of <span></span><math>\n <mrow>\n <msub>\n <mi>T</mi>\n <mi>R</mi>\n </msub>\n </mrow></math> from the time response data is sufficient to estimate <span></span><math>\n <mrow>\n <mi>ξ</mi>\n </mrow></math>. The second correlation establishes that for a given <span></span><math>\n <mrow>\n <mi>ξ</mi>\n </mrow></math>, <span></span><math>\n <mrow>\n <msub>\n <mi>f</mi>\n <mi>r</mi>\n </msub>\n </mrow></math> is a function of <span></span><math>\n <mrow>\n <msub>\n <mi>ω</mi>\n <mi>n</mi>\n </msub>\n </mrow></math>. Thus the evaluation of <span></span><math>\n <mrow>\n <msub>\n <mi>f</mi>\n <mi>r</mi>\n </msub>\n </mrow></math> from the time response data and an estimate of <span></span><math>\n <mrow>\n <mi>ξ</mi>\n </mrow></math> from the first correlation is sufficient to estimate <span></span><math>\n <mrow>\n <msub>\n <mi>ω</mi>\n <mi>n</mi>\n </msub>\n </mrow></math>. The proposed algorithm estimates the parameters of the canonical transfer function of the plant by these correlations from the three specific time instants, as mentioned above, of the step response of the plant. Comparisons with four methods existing in the literature reveal that the method is also effective with higher order systems that may be approximated by SOPDT dynamics, and robust even with measurement noise, making it useful for implementing control strategies, not only in process plants but also in other systems having similar time responses.</p>","PeriodicalId":100030,"journal":{"name":"Advanced Control for Applications","volume":"6 3","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-07-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adc2.229","citationCount":"0","resultStr":"{\"title\":\"Efficient parameter estimation for second order plus dead time systems in process plant control\",\"authors\":\"Mahua Pal, Kumardeb Banerjee, Bivas Dam\",\"doi\":\"10.1002/adc2.229\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Designing a controller for a process plant typically modeled as a first or second-order system with dead time involves an efficient and accurate estimation of its parameters. Since many process plants are characterized as second-order plus dead time (SOPDT) overdamped or critically damped systems, this study presents a straightforward parameter estimation method using transient response data from a step input at three specific time instants. Two-time domain performance indices (PIs), <span></span><math>\\n <mrow>\\n <msub>\\n <mi>T</mi>\\n <mi>R</mi>\\n </msub>\\n </mrow></math> (= <span></span><math>\\n <mrow>\\n <mfrac>\\n <msub>\\n <mi>t</mi>\\n <mn>90</mn>\\n </msub>\\n <msub>\\n <mi>t</mi>\\n <mn>10</mn>\\n </msub>\\n </mfrac>\\n </mrow></math> for system dead time = 0 and <span></span><math>\\n <mrow>\\n <mfrac>\\n <mrow>\\n <msub>\\n <mi>t</mi>\\n <mn>90</mn>\\n </msub>\\n <mo>−</mo>\\n <msub>\\n <mi>t</mi>\\n <mn>5</mn>\\n </msub>\\n <mspace></mspace>\\n </mrow>\\n <mrow>\\n <msub>\\n <mi>t</mi>\\n <mn>10</mn>\\n </msub>\\n <mo>−</mo>\\n <msub>\\n <mi>t</mi>\\n <mn>5</mn>\\n </msub>\\n <mspace></mspace>\\n </mrow>\\n </mfrac>\\n </mrow></math> for system dead time ≠ 0; <span></span><math>\\n <mrow>\\n <msub>\\n <mi>t</mi>\\n <mn>5</mn>\\n </msub>\\n </mrow></math>, <span></span><math>\\n <mrow>\\n <msub>\\n <mi>t</mi>\\n <mn>10</mn>\\n </msub>\\n </mrow></math> and <span></span><math>\\n <mrow>\\n <msub>\\n <mi>t</mi>\\n <mn>90</mn>\\n </msub>\\n </mrow></math> are respectively the times at which the response reaches 5%, 10% and 90% of the steady-state response) and <span></span><math>\\n <mrow>\\n <msub>\\n <mi>f</mi>\\n <mi>r</mi>\\n </msub>\\n </mrow></math> (reciprocal of rise time <span></span><math>\\n <mrow>\\n <msub>\\n <mi>t</mi>\\n <mi>r</mi>\\n </msub>\\n </mrow></math>) are proposed in this work. Correlations are established between these PIs and the parameters of the SOPDT system. The first correlation establishes that <span></span><math>\\n <mrow>\\n <msub>\\n <mi>T</mi>\\n <mi>R</mi>\\n </msub>\\n </mrow></math> is a function of the damping ratio <span></span><math>\\n <mrow>\\n <mi>ξ</mi>\\n </mrow></math> only and is independent of the undamped natural frequency <span></span><math>\\n <mrow>\\n <mspace></mspace>\\n <msub>\\n <mi>ω</mi>\\n <mi>n</mi>\\n </msub>\\n <mo>,</mo>\\n </mrow></math> which means that the evaluation of <span></span><math>\\n <mrow>\\n <msub>\\n <mi>T</mi>\\n <mi>R</mi>\\n </msub>\\n </mrow></math> from the time response data is sufficient to estimate <span></span><math>\\n <mrow>\\n <mi>ξ</mi>\\n </mrow></math>. The second correlation establishes that for a given <span></span><math>\\n <mrow>\\n <mi>ξ</mi>\\n </mrow></math>, <span></span><math>\\n <mrow>\\n <msub>\\n <mi>f</mi>\\n <mi>r</mi>\\n </msub>\\n </mrow></math> is a function of <span></span><math>\\n <mrow>\\n <msub>\\n <mi>ω</mi>\\n <mi>n</mi>\\n </msub>\\n </mrow></math>. Thus the evaluation of <span></span><math>\\n <mrow>\\n <msub>\\n <mi>f</mi>\\n <mi>r</mi>\\n </msub>\\n </mrow></math> from the time response data and an estimate of <span></span><math>\\n <mrow>\\n <mi>ξ</mi>\\n </mrow></math> from the first correlation is sufficient to estimate <span></span><math>\\n <mrow>\\n <msub>\\n <mi>ω</mi>\\n <mi>n</mi>\\n </msub>\\n </mrow></math>. The proposed algorithm estimates the parameters of the canonical transfer function of the plant by these correlations from the three specific time instants, as mentioned above, of the step response of the plant. Comparisons with four methods existing in the literature reveal that the method is also effective with higher order systems that may be approximated by SOPDT dynamics, and robust even with measurement noise, making it useful for implementing control strategies, not only in process plants but also in other systems having similar time responses.</p>\",\"PeriodicalId\":100030,\"journal\":{\"name\":\"Advanced Control for Applications\",\"volume\":\"6 3\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-07-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adc2.229\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Control for Applications\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/adc2.229\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Control for Applications","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adc2.229","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Efficient parameter estimation for second order plus dead time systems in process plant control
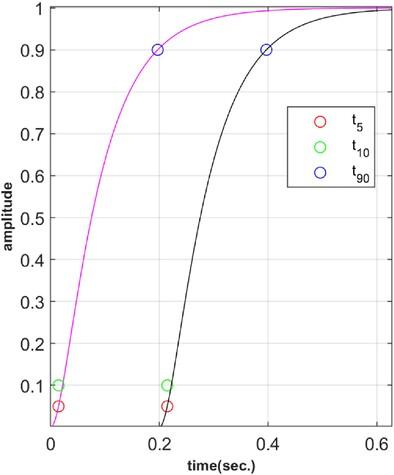
Designing a controller for a process plant typically modeled as a first or second-order system with dead time involves an efficient and accurate estimation of its parameters. Since many process plants are characterized as second-order plus dead time (SOPDT) overdamped or critically damped systems, this study presents a straightforward parameter estimation method using transient response data from a step input at three specific time instants. Two-time domain performance indices (PIs), (= for system dead time = 0 and for system dead time ≠ 0; , and are respectively the times at which the response reaches 5%, 10% and 90% of the steady-state response) and (reciprocal of rise time ) are proposed in this work. Correlations are established between these PIs and the parameters of the SOPDT system. The first correlation establishes that is a function of the damping ratio only and is independent of the undamped natural frequency which means that the evaluation of from the time response data is sufficient to estimate . The second correlation establishes that for a given , is a function of . Thus the evaluation of from the time response data and an estimate of from the first correlation is sufficient to estimate . The proposed algorithm estimates the parameters of the canonical transfer function of the plant by these correlations from the three specific time instants, as mentioned above, of the step response of the plant. Comparisons with four methods existing in the literature reveal that the method is also effective with higher order systems that may be approximated by SOPDT dynamics, and robust even with measurement noise, making it useful for implementing control strategies, not only in process plants but also in other systems having similar time responses.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


