{"title":"L*-用于评估自动潜航器(AUV)远距离性能的指数","authors":"Manfu Zhu, Liran Ma, Jianbin Luo","doi":"10.1007/s40544-023-0842-7","DOIUrl":null,"url":null,"abstract":"<p>Autonomous underwater vehicles (AUVs) have various applications in both military and civilian fields. A wider operation area and more complex tasks require better overall range performance of AUVs. However, until recently, there have been few unified criteria for evaluating the range performance of AUVs. In the present work, a unified range index, i.e., <i>L</i>*, considering the cruising speed, the sailing distance, and the volume of an AUV, is proposed for the first time, which can overcome the shortcomings of previous criteria using merely one single parameter, and provide a uniform criterion for the overall range performance of various AUVs. After constructing the expression of the <i>L</i>* index, the relevant data of 49 AUVs from 12 countries worldwide have been collected, and the characteristics of the <i>L</i>* range index in different countries and different categories were compared and discussed. Furthermore, by analyzing the complex factors affecting the range index, methods to enhance the <i>L</i>* range index value, such as efficiency enhancement and drag reduction, have been introduced and discussed. Under this condition, the work proposes a unified and scientific criterion for evaluating the range performance of AUVs for the first time, provides valuable theoretical insight for the development of AUVs with higher performance, and then arouses more attention to the application of the cutting-edge superlubricity technology to the field of underwater vehicles, which might greatly help to accelerate the coming of the era of the superlubricitive engineering.\n</p>","PeriodicalId":12442,"journal":{"name":"Friction","volume":"34 1","pages":""},"PeriodicalIF":6.3000,"publicationDate":"2024-07-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"L*—An index for evaluating long range performance of autonomous underwater vehicles (AUVs)\",\"authors\":\"Manfu Zhu, Liran Ma, Jianbin Luo\",\"doi\":\"10.1007/s40544-023-0842-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Autonomous underwater vehicles (AUVs) have various applications in both military and civilian fields. A wider operation area and more complex tasks require better overall range performance of AUVs. However, until recently, there have been few unified criteria for evaluating the range performance of AUVs. In the present work, a unified range index, i.e., <i>L</i>*, considering the cruising speed, the sailing distance, and the volume of an AUV, is proposed for the first time, which can overcome the shortcomings of previous criteria using merely one single parameter, and provide a uniform criterion for the overall range performance of various AUVs. After constructing the expression of the <i>L</i>* index, the relevant data of 49 AUVs from 12 countries worldwide have been collected, and the characteristics of the <i>L</i>* range index in different countries and different categories were compared and discussed. Furthermore, by analyzing the complex factors affecting the range index, methods to enhance the <i>L</i>* range index value, such as efficiency enhancement and drag reduction, have been introduced and discussed. Under this condition, the work proposes a unified and scientific criterion for evaluating the range performance of AUVs for the first time, provides valuable theoretical insight for the development of AUVs with higher performance, and then arouses more attention to the application of the cutting-edge superlubricity technology to the field of underwater vehicles, which might greatly help to accelerate the coming of the era of the superlubricitive engineering.\\n</p>\",\"PeriodicalId\":12442,\"journal\":{\"name\":\"Friction\",\"volume\":\"34 1\",\"pages\":\"\"},\"PeriodicalIF\":6.3000,\"publicationDate\":\"2024-07-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Friction\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s40544-023-0842-7\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Friction","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s40544-023-0842-7","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
L*—An index for evaluating long range performance of autonomous underwater vehicles (AUVs)
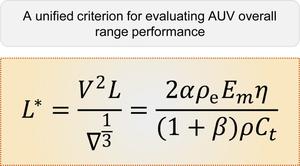
Autonomous underwater vehicles (AUVs) have various applications in both military and civilian fields. A wider operation area and more complex tasks require better overall range performance of AUVs. However, until recently, there have been few unified criteria for evaluating the range performance of AUVs. In the present work, a unified range index, i.e., L*, considering the cruising speed, the sailing distance, and the volume of an AUV, is proposed for the first time, which can overcome the shortcomings of previous criteria using merely one single parameter, and provide a uniform criterion for the overall range performance of various AUVs. After constructing the expression of the L* index, the relevant data of 49 AUVs from 12 countries worldwide have been collected, and the characteristics of the L* range index in different countries and different categories were compared and discussed. Furthermore, by analyzing the complex factors affecting the range index, methods to enhance the L* range index value, such as efficiency enhancement and drag reduction, have been introduced and discussed. Under this condition, the work proposes a unified and scientific criterion for evaluating the range performance of AUVs for the first time, provides valuable theoretical insight for the development of AUVs with higher performance, and then arouses more attention to the application of the cutting-edge superlubricity technology to the field of underwater vehicles, which might greatly help to accelerate the coming of the era of the superlubricitive engineering.
期刊介绍:
Friction is a peer-reviewed international journal for the publication of theoretical and experimental research works related to the friction, lubrication and wear. Original, high quality research papers and review articles on all aspects of tribology are welcome, including, but are not limited to, a variety of topics, such as:
Friction: Origin of friction, Friction theories, New phenomena of friction, Nano-friction, Ultra-low friction, Molecular friction, Ultra-high friction, Friction at high speed, Friction at high temperature or low temperature, Friction at solid/liquid interfaces, Bio-friction, Adhesion, etc.
Lubrication: Superlubricity, Green lubricants, Nano-lubrication, Boundary lubrication, Thin film lubrication, Elastohydrodynamic lubrication, Mixed lubrication, New lubricants, New additives, Gas lubrication, Solid lubrication, etc.
Wear: Wear materials, Wear mechanism, Wear models, Wear in severe conditions, Wear measurement, Wear monitoring, etc.
Surface Engineering: Surface texturing, Molecular films, Surface coatings, Surface modification, Bionic surfaces, etc.
Basic Sciences: Tribology system, Principles of tribology, Thermodynamics of tribo-systems, Micro-fluidics, Thermal stability of tribo-systems, etc.
Friction is an open access journal. It is published quarterly by Tsinghua University Press and Springer, and sponsored by the State Key Laboratory of Tribology (TsinghuaUniversity) and the Tribology Institute of Chinese Mechanical Engineering Society.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


