具有可变有效载荷和风干扰的四旋翼悬挂负载系统的自适应控制
IF 2.2
4区 计算机科学
Q2 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
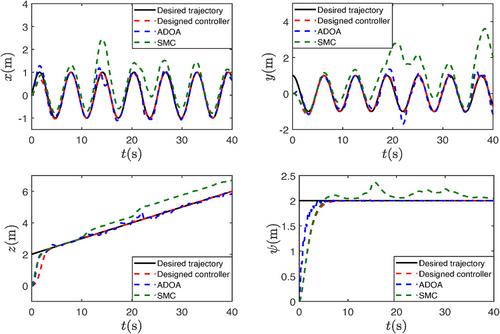
本文介绍了四旋翼悬挂载荷系统的自适应控制方案,以在有效载荷可变和风干扰的情况下跟踪所需的轨迹。考虑到 Dryden 模型描述的风场的影响,建立了四旋翼悬挂载荷系统的动态模型。为了减小有效载荷变化和风扰动对系统的影响,设计了一种基于扰动观测器的自适应控制方法。此外,还证明了所有误差信号的均匀有界性。通过模拟验证了所设计控制方法的有效性,从而加强了其在实际应用中的适用性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Adaptive control of quadrotor suspended load systems with variable payload and wind disturbances
This paper introduces an adaptive control scheme for quadrotor suspended load systems, to track desired trajectory with variable payload and wind disturbances. The dynamic model of the quadrotor suspended load system is developed, taking into account the impact of the wind field described by the Dryden model. To attenuate the effects of payload variation and wind disturbances on the system, an adaptive control method based on disturbance observers is devised. Additionally, the uniform boundedness of all error signals is demonstrated. The effectiveness of the designed control method is verified through simulations, which serves to strengthen its applicability in practical applications.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

IET Control Theory and Applications
工程技术-工程:电子与电气
CiteScore
5.70
自引率
7.70%
发文量
167
审稿时长
5.1 months
期刊介绍:
IET Control Theory & Applications is devoted to control systems in the broadest sense, covering new theoretical results and the applications of new and established control methods. Among the topics of interest are system modelling, identification and simulation, the analysis and design of control systems (including computer-aided design), and practical implementation. The scope encompasses technological, economic, physiological (biomedical) and other systems, including man-machine interfaces.
Most of the papers published deal with original work from industrial and government laboratories and universities, but subject reviews and tutorial expositions of current methods are welcomed. Correspondence discussing published papers is also welcomed.
Applications papers need not necessarily involve new theory. Papers which describe new realisations of established methods, or control techniques applied in a novel situation, or practical studies which compare various designs, would be of interest. Of particular value are theoretical papers which discuss the applicability of new work or applications which engender new theoretical applications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


