Xiaorong Dou, Zheqi Chen, Fuhao Ren, Lijun He, Jianxiong Chen, Li-Juan Yin, Yingwu Luo, Zhi-Min Dang, Jie Mao
{"title":"具有大侧群的介电弹性体网络可实现软机器人抓手的大电活性变形","authors":"Xiaorong Dou, Zheqi Chen, Fuhao Ren, Lijun He, Jianxiong Chen, Li-Juan Yin, Yingwu Luo, Zhi-Min Dang, Jie Mao","doi":"10.1002/adfm.202407049","DOIUrl":null,"url":null,"abstract":"<p>Dielectric elastomer actuators (DEAs) face an acknowledged challenge: On the one hand, the majority of elastomers only achieve small electroactive deformation (<20%) in the absence of prestretch; on the other hand, rare elastomers capable of showing large electroactive deformation require relatively complicated processing and chemistry. This work addresses this challenge by fabricating an elastomer with a network of large side groups, which achieves a very large electroactive deformation (218%) without pre-stretch. This elastomer can be rapidly and massively fabricated within a few min, by polymerizing a commercial monomer with a large alkyl side group. The large side groups in the polymer network repel each other and extend the load-bearing strands, which results in a pronounced strain-hardening behavior. This behavior helps the elastomer to get rid of electromechanical instability during actuation and hence to exhibit a large electro-active deformation, a high energy density (>> human muscle), and a large output force (≈500 times self-weight). the elastomer capable of manufacturing a soft electroactive gripper is demonstrated with large deformation, large force, and rapid response, which enables grasping fragile objects of various complex shapes in an agile away.</p>","PeriodicalId":112,"journal":{"name":"Advanced Functional Materials","volume":"34 44","pages":""},"PeriodicalIF":19.0000,"publicationDate":"2024-07-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Dielectric Elastomer Network with Large Side Groups Achieves Large Electroactive Deformation for Soft Robotic Grippers\",\"authors\":\"Xiaorong Dou, Zheqi Chen, Fuhao Ren, Lijun He, Jianxiong Chen, Li-Juan Yin, Yingwu Luo, Zhi-Min Dang, Jie Mao\",\"doi\":\"10.1002/adfm.202407049\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Dielectric elastomer actuators (DEAs) face an acknowledged challenge: On the one hand, the majority of elastomers only achieve small electroactive deformation (<20%) in the absence of prestretch; on the other hand, rare elastomers capable of showing large electroactive deformation require relatively complicated processing and chemistry. This work addresses this challenge by fabricating an elastomer with a network of large side groups, which achieves a very large electroactive deformation (218%) without pre-stretch. This elastomer can be rapidly and massively fabricated within a few min, by polymerizing a commercial monomer with a large alkyl side group. The large side groups in the polymer network repel each other and extend the load-bearing strands, which results in a pronounced strain-hardening behavior. This behavior helps the elastomer to get rid of electromechanical instability during actuation and hence to exhibit a large electro-active deformation, a high energy density (>> human muscle), and a large output force (≈500 times self-weight). the elastomer capable of manufacturing a soft electroactive gripper is demonstrated with large deformation, large force, and rapid response, which enables grasping fragile objects of various complex shapes in an agile away.</p>\",\"PeriodicalId\":112,\"journal\":{\"name\":\"Advanced Functional Materials\",\"volume\":\"34 44\",\"pages\":\"\"},\"PeriodicalIF\":19.0000,\"publicationDate\":\"2024-07-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Functional Materials\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/adfm.202407049\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Functional Materials","FirstCategoryId":"88","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adfm.202407049","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
Dielectric Elastomer Network with Large Side Groups Achieves Large Electroactive Deformation for Soft Robotic Grippers
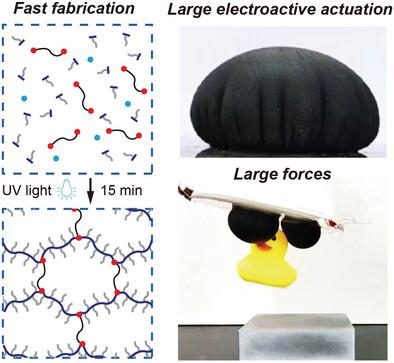
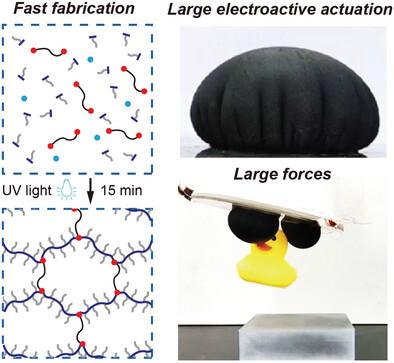
Dielectric elastomer actuators (DEAs) face an acknowledged challenge: On the one hand, the majority of elastomers only achieve small electroactive deformation (<20%) in the absence of prestretch; on the other hand, rare elastomers capable of showing large electroactive deformation require relatively complicated processing and chemistry. This work addresses this challenge by fabricating an elastomer with a network of large side groups, which achieves a very large electroactive deformation (218%) without pre-stretch. This elastomer can be rapidly and massively fabricated within a few min, by polymerizing a commercial monomer with a large alkyl side group. The large side groups in the polymer network repel each other and extend the load-bearing strands, which results in a pronounced strain-hardening behavior. This behavior helps the elastomer to get rid of electromechanical instability during actuation and hence to exhibit a large electro-active deformation, a high energy density (>> human muscle), and a large output force (≈500 times self-weight). the elastomer capable of manufacturing a soft electroactive gripper is demonstrated with large deformation, large force, and rapid response, which enables grasping fragile objects of various complex shapes in an agile away.
期刊介绍:
Firmly established as a top-tier materials science journal, Advanced Functional Materials reports breakthrough research in all aspects of materials science, including nanotechnology, chemistry, physics, and biology every week.
Advanced Functional Materials is known for its rapid and fair peer review, quality content, and high impact, making it the first choice of the international materials science community.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


