一种便携式充气软式可穿戴机器人,用于在工业工作中辅助肩部。
IF 26.1
1区 计算机科学
Q1 ROBOTICS
引用次数: 0
摘要
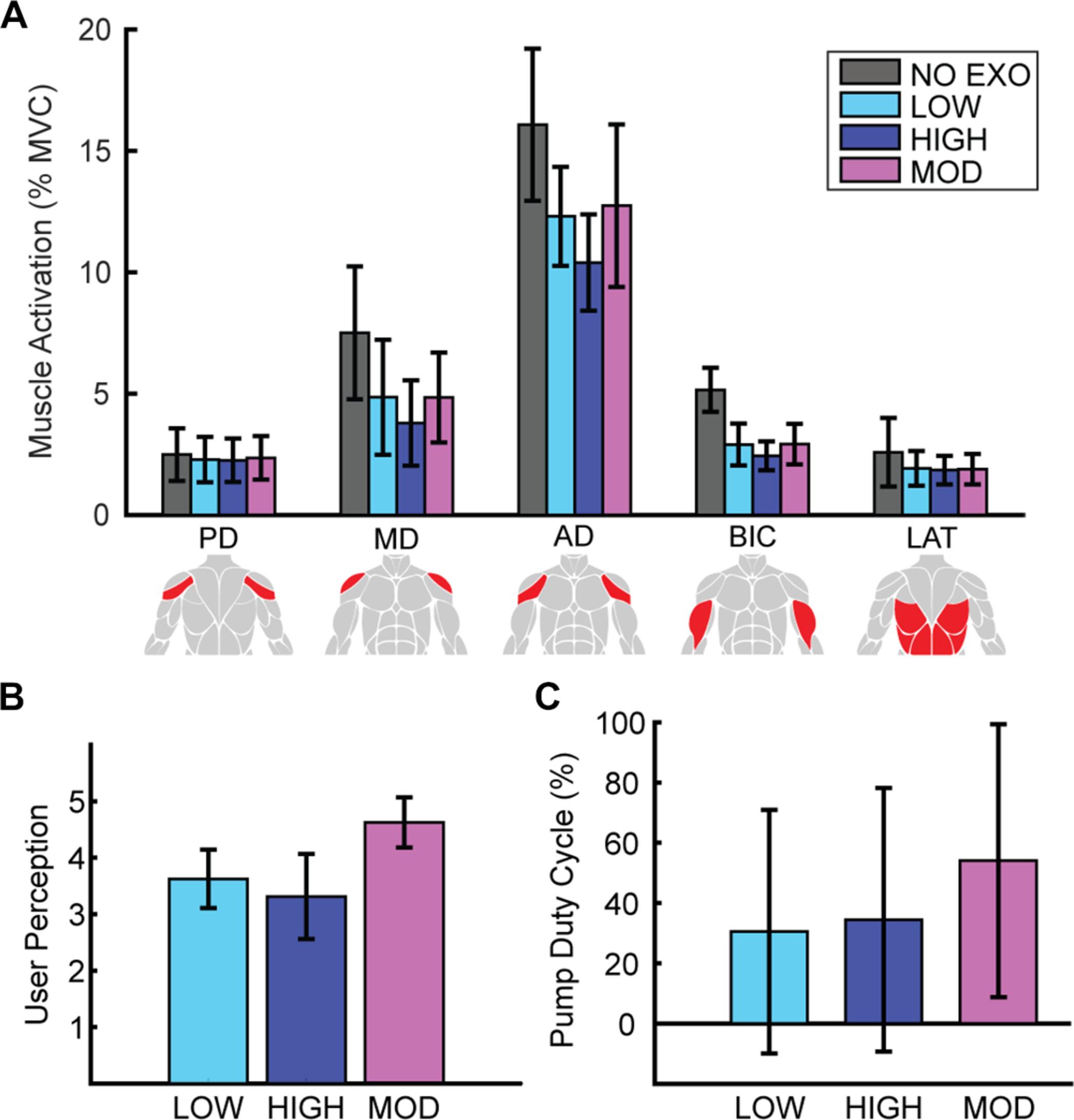
在工厂工作期间,重复性的高空作业可能会导致肩部受伤,从而影响健康和生产率。软质可穿戴上肢机器人有可能成为有效的预防损伤工具,它采用软质材料和主动控制,限制最少。我们介绍了一种便携式肩部充气可穿戴机器人的设计和评估,该机器人可在工业工人执行肩部抬高任务时提供帮助。该机器人像衬衫一样穿在身上,集成了纺织气动执行器、惯性测量单元和便携式执行单元。它可以提供高达 6.6 牛顿-米的扭矩来支撑肩部,并以每分钟六次的频率循环开启和关闭辅助装置。根据人类参与者在模拟工业任务中的评估,在目前的样本量中,机器人在关节角度发生小于 7% 运动范围的轻微变化时,可减少多达 40% 的激动肌活动(三角肌前部、中部和后部以及肱二头肌),同时不会增加拮抗肌活动(背阔肌)。对控制器参数的比较进一步突出表明,较高的辅助幅度和较早的辅助时间可在统计学上显著减少肌肉活动。在不同任务之间动态转换的任务回路中,机器人基于运动学的控制器显示出对错误膨胀的稳健性(96% 的真实负值率和 91% 的真实正值率),表明在不需要辅助时对用户的干扰最小。对压力调制曲线的初步评估也强调了用户感知和硬件需求之间的权衡。最后,五名汽车厂工人在试验制造区使用了机器人,并提供了反馈意见。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A portable inflatable soft wearable robot to assist the shoulder during industrial work
Repetitive overhead tasks during factory work can cause shoulder injuries resulting in impaired health and productivity loss. Soft wearable upper extremity robots have the potential to be effective injury prevention tools with minimal restrictions using soft materials and active controls. We present the design and evaluation of a portable inflatable shoulder wearable robot for assisting industrial workers during shoulder-elevated tasks. The robot is worn like a shirt with integrated textile pneumatic actuators, inertial measurement units, and a portable actuation unit. It can provide up to 6.6 newton-meters of torque to support the shoulder and cycle assistance on and off at six times per minute. From human participant evaluations during simulated industrial tasks, the robot reduced agonist muscle activities (anterior, middle, and posterior deltoids and biceps brachii) by up to 40% with slight changes in joint angles of less than 7% range of motion while not increasing antagonistic muscle activity (latissimus dorsi) in current sample size. Comparison of controller parameters further highlighted that higher assistance magnitude and earlier assistance timing resulted in statistically significant muscle activity reductions. During a task circuit with dynamic transitions among the tasks, the kinematics-based controller of the robot showed robustness to misinflations (96% true negative rate and 91% true positive rate), indicating minimal disturbances to the user when assistance was not required. A preliminary evaluation of a pressure modulation profile also highlighted a trade-off between user perception and hardware demands. Finally, five automotive factory workers used the robot in a pilot manufacturing area and provided feedback.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


