Chidanand Hegde, Ravi Chaithanya Mysa, Aaron Chooi, Saikrishna Dontu, Joel Ming Rui Tan, Lydia Helena Wong, Pablo Valdivia y Alvarado, Shlomo Magdassi
{"title":"利用可编程结构超材料实现软机器人抓手的三维打印机械光学力传感器","authors":"Chidanand Hegde, Ravi Chaithanya Mysa, Aaron Chooi, Saikrishna Dontu, Joel Ming Rui Tan, Lydia Helena Wong, Pablo Valdivia y Alvarado, Shlomo Magdassi","doi":"10.1002/aisy.202400057","DOIUrl":null,"url":null,"abstract":"<p>Rapid deployment of automation in today's world has opened up exciting possibilities in the realm of design and fabrication of soft robotic grippers endowed with sensing capabilities. Herein, a novel design and rapid fabrication by 3D printing of a mechano-optic force sensor with a large dynamic range, sensitivity, and linear response, enabled by metamaterials-based structures, is presented. A simple approach for programming the metamaterial's behavior based on mathematical modeling of the sensor under dynamic loading is proposed. Machine learning models are utilized to predict the complete force–deformation profile, encompassing the linear range, the onset of nonlinear behavior, and the slope of profiles in both bending and compression-dominated regions. The design supports seamless integration of the sensor into soft grippers, enabling 3D printing of the soft gripper with an embedded sensor in a single step, thus overcoming the tedious and complex and multiple fabrication steps commonly applied in conventional processes. The sensor boasts a fine resolution of 0.015 N, a measurement range up to 16 N, linearity (adj. <i>R</i><sup>2</sup>–0.991), and delivers consistent performance beyond 100 000 cycles. The sensitivity and range of the embedded mechano-optic force sensor can be easily programmed by both the metamaterial structure and the material's properties.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 9","pages":""},"PeriodicalIF":6.1000,"publicationDate":"2024-06-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400057","citationCount":"0","resultStr":"{\"title\":\"3D-Printed Mechano-Optic Force Sensor for Soft Robotic Gripper Enabled by Programmable Structural Metamaterials\",\"authors\":\"Chidanand Hegde, Ravi Chaithanya Mysa, Aaron Chooi, Saikrishna Dontu, Joel Ming Rui Tan, Lydia Helena Wong, Pablo Valdivia y Alvarado, Shlomo Magdassi\",\"doi\":\"10.1002/aisy.202400057\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Rapid deployment of automation in today's world has opened up exciting possibilities in the realm of design and fabrication of soft robotic grippers endowed with sensing capabilities. Herein, a novel design and rapid fabrication by 3D printing of a mechano-optic force sensor with a large dynamic range, sensitivity, and linear response, enabled by metamaterials-based structures, is presented. A simple approach for programming the metamaterial's behavior based on mathematical modeling of the sensor under dynamic loading is proposed. Machine learning models are utilized to predict the complete force–deformation profile, encompassing the linear range, the onset of nonlinear behavior, and the slope of profiles in both bending and compression-dominated regions. The design supports seamless integration of the sensor into soft grippers, enabling 3D printing of the soft gripper with an embedded sensor in a single step, thus overcoming the tedious and complex and multiple fabrication steps commonly applied in conventional processes. The sensor boasts a fine resolution of 0.015 N, a measurement range up to 16 N, linearity (adj. <i>R</i><sup>2</sup>–0.991), and delivers consistent performance beyond 100 000 cycles. The sensitivity and range of the embedded mechano-optic force sensor can be easily programmed by both the metamaterial structure and the material's properties.</p>\",\"PeriodicalId\":93858,\"journal\":{\"name\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"volume\":\"6 9\",\"pages\":\"\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2024-06-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400057\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/aisy.202400057\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/aisy.202400057","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
摘要
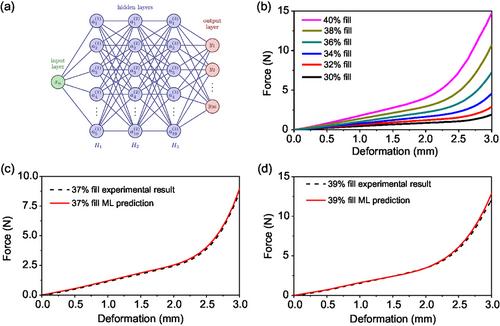
当今世界自动化的快速发展为设计和制造具有传感功能的软机械手提供了令人兴奋的可能性。本文介绍了一种利用超材料结构设计并通过三维打印技术快速制造的机械光学力传感器,该传感器具有动态范围大、灵敏度高和线性响应的特点。本文提出了一种基于动态负载下传感器数学建模的超材料行为编程简单方法。利用机器学习模型来预测完整的力-变形曲线,包括线性范围、非线性行为的开始以及弯曲和压缩主导区域的曲线斜率。该设计支持将传感器无缝集成到软抓手中,只需一步就能实现带有嵌入式传感器的软抓手的三维打印,从而克服了传统工艺中常见的繁琐、复杂和多重制造步骤。该传感器具有 0.015 N 的高分辨率,测量范围高达 16 N,线性度(adj. R2-0.991)良好,性能稳定,超过 100 000 次循环。嵌入式机械光学力传感器的灵敏度和量程可通过超材料结构和材料特性轻松编程。
3D-Printed Mechano-Optic Force Sensor for Soft Robotic Gripper Enabled by Programmable Structural Metamaterials
Rapid deployment of automation in today's world has opened up exciting possibilities in the realm of design and fabrication of soft robotic grippers endowed with sensing capabilities. Herein, a novel design and rapid fabrication by 3D printing of a mechano-optic force sensor with a large dynamic range, sensitivity, and linear response, enabled by metamaterials-based structures, is presented. A simple approach for programming the metamaterial's behavior based on mathematical modeling of the sensor under dynamic loading is proposed. Machine learning models are utilized to predict the complete force–deformation profile, encompassing the linear range, the onset of nonlinear behavior, and the slope of profiles in both bending and compression-dominated regions. The design supports seamless integration of the sensor into soft grippers, enabling 3D printing of the soft gripper with an embedded sensor in a single step, thus overcoming the tedious and complex and multiple fabrication steps commonly applied in conventional processes. The sensor boasts a fine resolution of 0.015 N, a measurement range up to 16 N, linearity (adj. R2–0.991), and delivers consistent performance beyond 100 000 cycles. The sensitivity and range of the embedded mechano-optic force sensor can be easily programmed by both the metamaterial structure and the material's properties.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


