Ayse Feyza Yilmaz, Kadir Ozlem, Mehmet Fatih Celebi, Bahman Taherkhani, Fatma Kalaoglu, Aslı Tunçay Atalay, Gokhan Ince, Ozgur Atalay
{"title":"设计并可扩展地快速制造用于软机器人人工肌肉应用的双轴布袋电机","authors":"Ayse Feyza Yilmaz, Kadir Ozlem, Mehmet Fatih Celebi, Bahman Taherkhani, Fatma Kalaoglu, Aslı Tunçay Atalay, Gokhan Ince, Ozgur Atalay","doi":"10.1002/aisy.202300888","DOIUrl":null,"url":null,"abstract":"<p>Soft pouch motors, engineered to mimic the natural movements of skeletal muscles, play a crucial role in advancing robotics and exoskeleton development. However, the fabrication techniques often involve multistage processes; they lack soft sensing capabilities and are sensitive to cutting and damage. This work introduces a new textile-based pouch motors with the capacity for biaxial actuation and capacitive sensory functions, achieved through the application of computerized knitting technology using ultrahigh molecular weight polyethylene yarn (Spectra) and conductive silver yarns. This method enables the rapid and scalable mass fabrication of robust pouch motors. The resulting pouch motors exhibit maximum lifting capacity of 10 kg, maximum contraction of 53.3% along the <i>y</i>-axis, and transverse extension of 41.18% along the <i>x</i>-axis at 50 kPa pressure. Finite element analysis closely matches the experimental data. The capacitance signals in relation to contraction motion are well suited for detecting air pressure levels and hold promise for applications requiring robotic control. Notably, it effectively elevates an ankle joint simulator at a 20° angle, highlighting its potential for applications such assisting individuals with foot drop. This study presents a practical demonstration of the soft ankle exosuit designed to provide lifting support for individuals facing this mobility challenge.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 8","pages":""},"PeriodicalIF":6.1000,"publicationDate":"2024-06-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202300888","citationCount":"0","resultStr":"{\"title\":\"Design and Scalable Fast Fabrication of Biaxial Fabric Pouch Motors for Soft Robotic Artificial Muscle Applications\",\"authors\":\"Ayse Feyza Yilmaz, Kadir Ozlem, Mehmet Fatih Celebi, Bahman Taherkhani, Fatma Kalaoglu, Aslı Tunçay Atalay, Gokhan Ince, Ozgur Atalay\",\"doi\":\"10.1002/aisy.202300888\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Soft pouch motors, engineered to mimic the natural movements of skeletal muscles, play a crucial role in advancing robotics and exoskeleton development. However, the fabrication techniques often involve multistage processes; they lack soft sensing capabilities and are sensitive to cutting and damage. This work introduces a new textile-based pouch motors with the capacity for biaxial actuation and capacitive sensory functions, achieved through the application of computerized knitting technology using ultrahigh molecular weight polyethylene yarn (Spectra) and conductive silver yarns. This method enables the rapid and scalable mass fabrication of robust pouch motors. The resulting pouch motors exhibit maximum lifting capacity of 10 kg, maximum contraction of 53.3% along the <i>y</i>-axis, and transverse extension of 41.18% along the <i>x</i>-axis at 50 kPa pressure. Finite element analysis closely matches the experimental data. The capacitance signals in relation to contraction motion are well suited for detecting air pressure levels and hold promise for applications requiring robotic control. Notably, it effectively elevates an ankle joint simulator at a 20° angle, highlighting its potential for applications such assisting individuals with foot drop. This study presents a practical demonstration of the soft ankle exosuit designed to provide lifting support for individuals facing this mobility challenge.</p>\",\"PeriodicalId\":93858,\"journal\":{\"name\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"volume\":\"6 8\",\"pages\":\"\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2024-06-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202300888\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/aisy.202300888\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/aisy.202300888","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
摘要
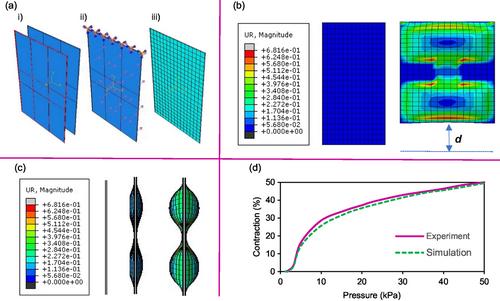
软袋电机可模仿骨骼肌的自然运动,在推动机器人和外骨骼开发方面发挥着至关重要的作用。然而,制造技术通常涉及多级工艺;它们缺乏软传感能力,对切割和损坏敏感。这项工作介绍了一种新型纺织品袋电机,它具有双轴致动能力和电容传感功能,是通过使用超高分子量聚乙烯纱线(Spectra)和导电银纱的计算机编织技术实现的。这种方法能够快速、可扩展地大规模制造坚固耐用的邮袋电机。在 50 kPa 压力下,所制成的袋状马达的最大起重能力为 10 kg,沿 Y 轴的最大收缩率为 53.3%,沿 X 轴的横向伸展率为 41.18%。有限元分析与实验数据非常吻合。与收缩运动相关的电容信号非常适合用于检测气压水平,并有望应用于需要机器人控制的场合。值得注意的是,它能有效地将踝关节模拟器抬高 20°,突出了其在辅助足下垂患者等应用中的潜力。本研究介绍了软质踝关节外衣的实际演示,该外衣旨在为面临这种行动挑战的人提供提升支持。
Design and Scalable Fast Fabrication of Biaxial Fabric Pouch Motors for Soft Robotic Artificial Muscle Applications
Soft pouch motors, engineered to mimic the natural movements of skeletal muscles, play a crucial role in advancing robotics and exoskeleton development. However, the fabrication techniques often involve multistage processes; they lack soft sensing capabilities and are sensitive to cutting and damage. This work introduces a new textile-based pouch motors with the capacity for biaxial actuation and capacitive sensory functions, achieved through the application of computerized knitting technology using ultrahigh molecular weight polyethylene yarn (Spectra) and conductive silver yarns. This method enables the rapid and scalable mass fabrication of robust pouch motors. The resulting pouch motors exhibit maximum lifting capacity of 10 kg, maximum contraction of 53.3% along the y-axis, and transverse extension of 41.18% along the x-axis at 50 kPa pressure. Finite element analysis closely matches the experimental data. The capacitance signals in relation to contraction motion are well suited for detecting air pressure levels and hold promise for applications requiring robotic control. Notably, it effectively elevates an ankle joint simulator at a 20° angle, highlighting its potential for applications such assisting individuals with foot drop. This study presents a practical demonstration of the soft ankle exosuit designed to provide lifting support for individuals facing this mobility challenge.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


