Xiyue Cui, Yuyang Zeng, Liutong Qin, Xiang Cheng, Yuanyuan Yang
{"title":"用于按需机器人操纵的可视化传感集成多响应软执行器","authors":"Xiyue Cui, Yuyang Zeng, Liutong Qin, Xiang Cheng, Yuanyuan Yang","doi":"10.1002/admt.202302099","DOIUrl":null,"url":null,"abstract":"<p>Research on small-scale soft robots has emerged in recent years, and various soft actuators have been developed to implement various actions. Nevertheless, realizing self-sensing alongside environmental sensing capabilities remains a challenge, largely due to the constraints imposed by compact dimensions and the limited load-bearing capacity intrinsic to these robots. In this study, an innovative approach is introduced through the development of a visualized sensing integrated soft actuator, which harnesses the actuator's color as a straightforward and real-time sensing medium. Additionally, a multi-responsive actuation mechanism is adopted in which the actuator responds concurrently to both electric and magnetic fields. To exemplify the efficacy of this concept, the actuators are engineered as flexible soft grippers, thereby accommodating functions encompassing grasping and transporting. Relying on the color distribution manifested by the actuator, the actuator's self-sensing ability alongside its capacity to discern object temperatures is demonstrated. Such a soft actuator provides new perspectives in the realm of soft robotics, showing great potential in diverse robotic applications.</p>","PeriodicalId":7292,"journal":{"name":"Advanced Materials Technologies","volume":"9 14","pages":""},"PeriodicalIF":6.4000,"publicationDate":"2024-05-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Visualized Sensing-Integrated Multi-Responsive Soft Actuator for On-Demand Robotic Manipulation\",\"authors\":\"Xiyue Cui, Yuyang Zeng, Liutong Qin, Xiang Cheng, Yuanyuan Yang\",\"doi\":\"10.1002/admt.202302099\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Research on small-scale soft robots has emerged in recent years, and various soft actuators have been developed to implement various actions. Nevertheless, realizing self-sensing alongside environmental sensing capabilities remains a challenge, largely due to the constraints imposed by compact dimensions and the limited load-bearing capacity intrinsic to these robots. In this study, an innovative approach is introduced through the development of a visualized sensing integrated soft actuator, which harnesses the actuator's color as a straightforward and real-time sensing medium. Additionally, a multi-responsive actuation mechanism is adopted in which the actuator responds concurrently to both electric and magnetic fields. To exemplify the efficacy of this concept, the actuators are engineered as flexible soft grippers, thereby accommodating functions encompassing grasping and transporting. Relying on the color distribution manifested by the actuator, the actuator's self-sensing ability alongside its capacity to discern object temperatures is demonstrated. Such a soft actuator provides new perspectives in the realm of soft robotics, showing great potential in diverse robotic applications.</p>\",\"PeriodicalId\":7292,\"journal\":{\"name\":\"Advanced Materials Technologies\",\"volume\":\"9 14\",\"pages\":\"\"},\"PeriodicalIF\":6.4000,\"publicationDate\":\"2024-05-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Materials Technologies\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/admt.202302099\",\"RegionNum\":3,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials Technologies","FirstCategoryId":"88","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/admt.202302099","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
Visualized Sensing-Integrated Multi-Responsive Soft Actuator for On-Demand Robotic Manipulation
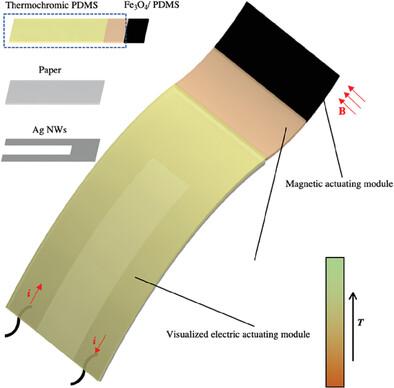
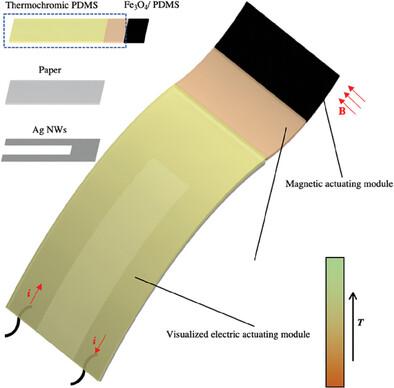
Research on small-scale soft robots has emerged in recent years, and various soft actuators have been developed to implement various actions. Nevertheless, realizing self-sensing alongside environmental sensing capabilities remains a challenge, largely due to the constraints imposed by compact dimensions and the limited load-bearing capacity intrinsic to these robots. In this study, an innovative approach is introduced through the development of a visualized sensing integrated soft actuator, which harnesses the actuator's color as a straightforward and real-time sensing medium. Additionally, a multi-responsive actuation mechanism is adopted in which the actuator responds concurrently to both electric and magnetic fields. To exemplify the efficacy of this concept, the actuators are engineered as flexible soft grippers, thereby accommodating functions encompassing grasping and transporting. Relying on the color distribution manifested by the actuator, the actuator's self-sensing ability alongside its capacity to discern object temperatures is demonstrated. Such a soft actuator provides new perspectives in the realm of soft robotics, showing great potential in diverse robotic applications.
期刊介绍:
Advanced Materials Technologies Advanced Materials Technologies is the new home for all technology-related materials applications research, with particular focus on advanced device design, fabrication and integration, as well as new technologies based on novel materials. It bridges the gap between fundamental laboratory research and industry.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


