{"title":"自走式机器人的可调主动动力学编程。","authors":"Somnath Paramanick, Arnab Pal, Harsh Soni, Nitin Kumar","doi":"10.1140/epje/s10189-024-00430-x","DOIUrl":null,"url":null,"abstract":"<p>We present a scheme for producing tunable active dynamics in a self-propelled robotic device. The robot moves using the differential drive mechanism where two wheels can vary their instantaneous velocities independently. These velocities are calculated by equating robot’s equations of motion in two dimensions with well-established active particle models and encoded into the robot’s microcontroller. We demonstrate that the robot can depict active Brownian, run and tumble, and Brownian dynamics with a wide range of parameters. The resulting motion analyzed using particle tracking shows excellent agreement with the theoretically predicted trajectories. Later, we show that its motion can be switched between different dynamics using light intensity as an external parameter. Intriguingly, we demonstrate that the robot can efficiently navigate through many obstacles by performing stochastic reorientations driven by the gradient in light intensity towards a desired location, namely the target. This work opens an avenue for designing tunable active systems with the potential of revealing the physics of active matter and its application for bio- and nature-inspired robotics.</p>","PeriodicalId":790,"journal":{"name":"The European Physical Journal E","volume":"47 5","pages":""},"PeriodicalIF":2.2000,"publicationDate":"2024-05-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Programming tunable active dynamics in a self-propelled robot\",\"authors\":\"Somnath Paramanick, Arnab Pal, Harsh Soni, Nitin Kumar\",\"doi\":\"10.1140/epje/s10189-024-00430-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>We present a scheme for producing tunable active dynamics in a self-propelled robotic device. The robot moves using the differential drive mechanism where two wheels can vary their instantaneous velocities independently. These velocities are calculated by equating robot’s equations of motion in two dimensions with well-established active particle models and encoded into the robot’s microcontroller. We demonstrate that the robot can depict active Brownian, run and tumble, and Brownian dynamics with a wide range of parameters. The resulting motion analyzed using particle tracking shows excellent agreement with the theoretically predicted trajectories. Later, we show that its motion can be switched between different dynamics using light intensity as an external parameter. Intriguingly, we demonstrate that the robot can efficiently navigate through many obstacles by performing stochastic reorientations driven by the gradient in light intensity towards a desired location, namely the target. This work opens an avenue for designing tunable active systems with the potential of revealing the physics of active matter and its application for bio- and nature-inspired robotics.</p>\",\"PeriodicalId\":790,\"journal\":{\"name\":\"The European Physical Journal E\",\"volume\":\"47 5\",\"pages\":\"\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2024-05-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"The European Physical Journal E\",\"FirstCategoryId\":\"4\",\"ListUrlMain\":\"https://link.springer.com/article/10.1140/epje/s10189-024-00430-x\",\"RegionNum\":4,\"RegionCategory\":\"物理与天体物理\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"CHEMISTRY, PHYSICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"The European Physical Journal E","FirstCategoryId":"4","ListUrlMain":"https://link.springer.com/article/10.1140/epje/s10189-024-00430-x","RegionNum":4,"RegionCategory":"物理与天体物理","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
Programming tunable active dynamics in a self-propelled robot
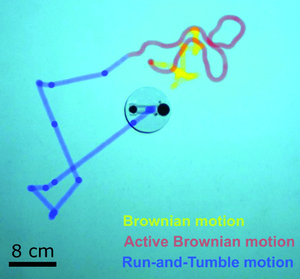
We present a scheme for producing tunable active dynamics in a self-propelled robotic device. The robot moves using the differential drive mechanism where two wheels can vary their instantaneous velocities independently. These velocities are calculated by equating robot’s equations of motion in two dimensions with well-established active particle models and encoded into the robot’s microcontroller. We demonstrate that the robot can depict active Brownian, run and tumble, and Brownian dynamics with a wide range of parameters. The resulting motion analyzed using particle tracking shows excellent agreement with the theoretically predicted trajectories. Later, we show that its motion can be switched between different dynamics using light intensity as an external parameter. Intriguingly, we demonstrate that the robot can efficiently navigate through many obstacles by performing stochastic reorientations driven by the gradient in light intensity towards a desired location, namely the target. This work opens an avenue for designing tunable active systems with the potential of revealing the physics of active matter and its application for bio- and nature-inspired robotics.
期刊介绍:
EPJ E publishes papers describing advances in the understanding of physical aspects of Soft, Liquid and Living Systems.
Soft matter is a generic term for a large group of condensed, often heterogeneous systems -- often also called complex fluids -- that display a large response to weak external perturbations and that possess properties governed by slow internal dynamics.
Flowing matter refers to all systems that can actually flow, from simple to multiphase liquids, from foams to granular matter.
Living matter concerns the new physics that emerges from novel insights into the properties and behaviours of living systems. Furthermore, it aims at developing new concepts and quantitative approaches for the study of biological phenomena. Approaches from soft matter physics and statistical physics play a key role in this research.
The journal includes reports of experimental, computational and theoretical studies and appeals to the broad interdisciplinary communities including physics, chemistry, biology, mathematics and materials science.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


