{"title":"开发带有软铰链的桐木图案可伸缩触觉传感器阵列,实现高灵敏度力检测","authors":"Chenhao Mao, Jie Jin, Deqing Mei, Yancheng Wang","doi":"10.1002/adsr.202400012","DOIUrl":null,"url":null,"abstract":"<p>Flexible and stretchable tactile sensors are attracted in the fields of soft robotics, wearable electronics, and healthcare monitoring. The sensing performance of tactile sensors is commonly affected by external deformations like stretching, bending, and twisting, thus they may fail to function on deformable object surfaces. This paper presents a stretchable tactile sensor array using kirigami-patterned structural design and soft hinges to reduce the influences of deformation. The kirigami pattern of sensor array is parametrically studied to achieve the required expansion patterns. Laser engraving is employed to modify the micropillars on the force-sensitive rubber surface to increase the sensitivity. Characterization tests show that the sensor array has high sensitivity (≈1.49 × 10<sup>−1</sup> kPa<sup>−1</sup>) for force sensing, and the stretching and bending deformation have almost negligible effects on sensing performance. Under 40% stretching or 180° bending conditions, the measured resistance changes (Δ<i>R</i>/<i>R</i><sub>0</sub>) is ≈0.03 and 0.06, respectively. To demonstrate the capability of developed sensor array, it is mounted on an expandable balloon surface for force detection. The recorded signals changed less than 1.5% during expanding process while rapidly rose under applied force, which indicated that the sensor array has the potential to effectively function on complex and deforming surfaces.</p>","PeriodicalId":100037,"journal":{"name":"Advanced Sensor Research","volume":"3 8","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-04-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adsr.202400012","citationCount":"0","resultStr":"{\"title\":\"Development of Kirigami-Patterned Stretchable Tactile Sensor Array with Soft Hinges for Highly Sensitive Force Detection\",\"authors\":\"Chenhao Mao, Jie Jin, Deqing Mei, Yancheng Wang\",\"doi\":\"10.1002/adsr.202400012\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Flexible and stretchable tactile sensors are attracted in the fields of soft robotics, wearable electronics, and healthcare monitoring. The sensing performance of tactile sensors is commonly affected by external deformations like stretching, bending, and twisting, thus they may fail to function on deformable object surfaces. This paper presents a stretchable tactile sensor array using kirigami-patterned structural design and soft hinges to reduce the influences of deformation. The kirigami pattern of sensor array is parametrically studied to achieve the required expansion patterns. Laser engraving is employed to modify the micropillars on the force-sensitive rubber surface to increase the sensitivity. Characterization tests show that the sensor array has high sensitivity (≈1.49 × 10<sup>−1</sup> kPa<sup>−1</sup>) for force sensing, and the stretching and bending deformation have almost negligible effects on sensing performance. Under 40% stretching or 180° bending conditions, the measured resistance changes (Δ<i>R</i>/<i>R</i><sub>0</sub>) is ≈0.03 and 0.06, respectively. To demonstrate the capability of developed sensor array, it is mounted on an expandable balloon surface for force detection. The recorded signals changed less than 1.5% during expanding process while rapidly rose under applied force, which indicated that the sensor array has the potential to effectively function on complex and deforming surfaces.</p>\",\"PeriodicalId\":100037,\"journal\":{\"name\":\"Advanced Sensor Research\",\"volume\":\"3 8\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-04-03\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adsr.202400012\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Sensor Research\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/adsr.202400012\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Sensor Research","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adsr.202400012","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Development of Kirigami-Patterned Stretchable Tactile Sensor Array with Soft Hinges for Highly Sensitive Force Detection
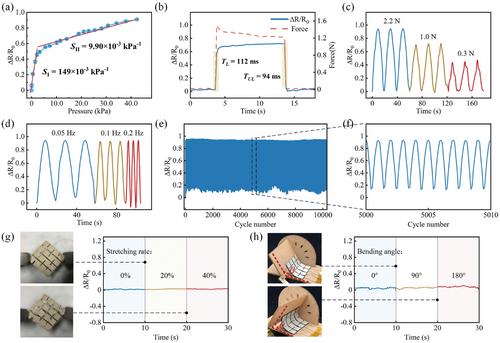
Flexible and stretchable tactile sensors are attracted in the fields of soft robotics, wearable electronics, and healthcare monitoring. The sensing performance of tactile sensors is commonly affected by external deformations like stretching, bending, and twisting, thus they may fail to function on deformable object surfaces. This paper presents a stretchable tactile sensor array using kirigami-patterned structural design and soft hinges to reduce the influences of deformation. The kirigami pattern of sensor array is parametrically studied to achieve the required expansion patterns. Laser engraving is employed to modify the micropillars on the force-sensitive rubber surface to increase the sensitivity. Characterization tests show that the sensor array has high sensitivity (≈1.49 × 10−1 kPa−1) for force sensing, and the stretching and bending deformation have almost negligible effects on sensing performance. Under 40% stretching or 180° bending conditions, the measured resistance changes (ΔR/R0) is ≈0.03 and 0.06, respectively. To demonstrate the capability of developed sensor array, it is mounted on an expandable balloon surface for force detection. The recorded signals changed less than 1.5% during expanding process while rapidly rose under applied force, which indicated that the sensor array has the potential to effectively function on complex and deforming surfaces.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


