{"title":"基于楔状核电刺激的半机械大鼠分级速度控制方法","authors":"Hanyi Ling, Le Han, Nenggan Zheng","doi":"10.1007/s42235-024-00501-x","DOIUrl":null,"url":null,"abstract":"<div><p>The precise movement speed regulation is a key factor to improve the control effect and efficiency of the cyborg rats. However, the current stimulation techniques cannot realize the graded control of the speed. In this study, we achieved the multi-level speed regulation of cyborg rats in the large open field and treadmill by specifically targeting the Cuneiform Nucleus (CnF) of the Mesencephalic Locomotor Region (MLR). Detailed, we measured the influence of each stimulation parameter on the speed control process which included the real-time speed, accelerated speed, response time, and acceleration period. We concluded that the pulse period and the pulse width were the main determinants influencing the accelerated speed of cyborg rats. Whereas the amplitude of stimulation was found to affect the response time exhibited by the cyborg rats. Our study provides valuable insights into the regulation of rat locomotion speed and highlights the potential for utilizing this approach in various experimental settings.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1334 - 1346"},"PeriodicalIF":4.9000,"publicationDate":"2024-04-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A Graded Speed Control Method for Cyborg Rats Based on Electrical Stimulation of the Cuneiform Nucleus\",\"authors\":\"Hanyi Ling, Le Han, Nenggan Zheng\",\"doi\":\"10.1007/s42235-024-00501-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>The precise movement speed regulation is a key factor to improve the control effect and efficiency of the cyborg rats. However, the current stimulation techniques cannot realize the graded control of the speed. In this study, we achieved the multi-level speed regulation of cyborg rats in the large open field and treadmill by specifically targeting the Cuneiform Nucleus (CnF) of the Mesencephalic Locomotor Region (MLR). Detailed, we measured the influence of each stimulation parameter on the speed control process which included the real-time speed, accelerated speed, response time, and acceleration period. We concluded that the pulse period and the pulse width were the main determinants influencing the accelerated speed of cyborg rats. Whereas the amplitude of stimulation was found to affect the response time exhibited by the cyborg rats. Our study provides valuable insights into the regulation of rat locomotion speed and highlights the potential for utilizing this approach in various experimental settings.</p></div>\",\"PeriodicalId\":614,\"journal\":{\"name\":\"Journal of Bionic Engineering\",\"volume\":\"21 3\",\"pages\":\"1334 - 1346\"},\"PeriodicalIF\":4.9000,\"publicationDate\":\"2024-04-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Bionic Engineering\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42235-024-00501-x\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00501-x","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
A Graded Speed Control Method for Cyborg Rats Based on Electrical Stimulation of the Cuneiform Nucleus
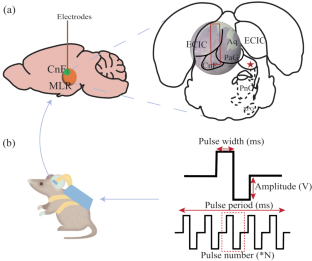
The precise movement speed regulation is a key factor to improve the control effect and efficiency of the cyborg rats. However, the current stimulation techniques cannot realize the graded control of the speed. In this study, we achieved the multi-level speed regulation of cyborg rats in the large open field and treadmill by specifically targeting the Cuneiform Nucleus (CnF) of the Mesencephalic Locomotor Region (MLR). Detailed, we measured the influence of each stimulation parameter on the speed control process which included the real-time speed, accelerated speed, response time, and acceleration period. We concluded that the pulse period and the pulse width were the main determinants influencing the accelerated speed of cyborg rats. Whereas the amplitude of stimulation was found to affect the response time exhibited by the cyborg rats. Our study provides valuable insights into the regulation of rat locomotion speed and highlights the potential for utilizing this approach in various experimental settings.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


