Changheon Han, Jiho Lee, Martin B. G. Jun, Sang Won Lee, Huitaek Yun
{"title":"通过自标记和多级深度学习策略实现可视化涂层检测框架","authors":"Changheon Han, Jiho Lee, Martin B. G. Jun, Sang Won Lee, Huitaek Yun","doi":"10.1007/s10845-024-02372-9","DOIUrl":null,"url":null,"abstract":"<p>An instantaneous and precise coating inspection method is imperative to mitigate the risk of flaws, defects, and discrepancies on coated surfaces. While many studies have demonstrated the effectiveness of automated visual inspection (AVI) approaches enhanced by computer vision and deep learning, critical challenges exist for practical applications in the manufacturing domain. Computer vision has proven to be inflexible, demanding sophisticated algorithms for diverse feature extraction. In deep learning, supervised approaches are constrained by the need for annotated datasets, whereas unsupervised methods often result in lower performance. Addressing these challenges, this paper proposes a novel deep learning-based automated visual inspection (AVI) framework designed to minimize the necessity for extensive feature engineering, programming, and manual data annotation in classifying fuel injection nozzles and discerning their coating interfaces from scratch. This proposed framework comprises six integral components: It begins by distinguishing between coated and uncoated nozzles through gray level co-occurrence matrix (GLCM)-based texture analysis and autoencoder (AE)-based classification. This is followed by cropping surface images from uncoated nozzles, and then building an AE model to estimate the coating interface locations on coated nozzles. The next step involves generating autonomously annotated datasets derived from these estimated coating interface locations. Subsequently, a convolutional neural network (CNN)-based detection model is trained to accurately localize the coating interface locations. The final component focuses on enhancing model performance and trustworthiness. This framework demonstrated over 95% accuracy in pinpointing the coating interfaces within the error range of ± 6 pixels and processed at a rate of 7.18 images per second. Additionally, explainable artificial intelligence (XAI) techniques such as t-distributed stochastic neighbor embedding (t-SNE) and the integrated gradient substantiated the reliability of the models.</p>","PeriodicalId":16193,"journal":{"name":"Journal of Intelligent Manufacturing","volume":"44 1","pages":""},"PeriodicalIF":7.4000,"publicationDate":"2024-04-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Visual coating inspection framework via self-labeling and multi-stage deep learning strategies\",\"authors\":\"Changheon Han, Jiho Lee, Martin B. G. Jun, Sang Won Lee, Huitaek Yun\",\"doi\":\"10.1007/s10845-024-02372-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>An instantaneous and precise coating inspection method is imperative to mitigate the risk of flaws, defects, and discrepancies on coated surfaces. While many studies have demonstrated the effectiveness of automated visual inspection (AVI) approaches enhanced by computer vision and deep learning, critical challenges exist for practical applications in the manufacturing domain. Computer vision has proven to be inflexible, demanding sophisticated algorithms for diverse feature extraction. In deep learning, supervised approaches are constrained by the need for annotated datasets, whereas unsupervised methods often result in lower performance. Addressing these challenges, this paper proposes a novel deep learning-based automated visual inspection (AVI) framework designed to minimize the necessity for extensive feature engineering, programming, and manual data annotation in classifying fuel injection nozzles and discerning their coating interfaces from scratch. This proposed framework comprises six integral components: It begins by distinguishing between coated and uncoated nozzles through gray level co-occurrence matrix (GLCM)-based texture analysis and autoencoder (AE)-based classification. This is followed by cropping surface images from uncoated nozzles, and then building an AE model to estimate the coating interface locations on coated nozzles. The next step involves generating autonomously annotated datasets derived from these estimated coating interface locations. Subsequently, a convolutional neural network (CNN)-based detection model is trained to accurately localize the coating interface locations. The final component focuses on enhancing model performance and trustworthiness. This framework demonstrated over 95% accuracy in pinpointing the coating interfaces within the error range of ± 6 pixels and processed at a rate of 7.18 images per second. Additionally, explainable artificial intelligence (XAI) techniques such as t-distributed stochastic neighbor embedding (t-SNE) and the integrated gradient substantiated the reliability of the models.</p>\",\"PeriodicalId\":16193,\"journal\":{\"name\":\"Journal of Intelligent Manufacturing\",\"volume\":\"44 1\",\"pages\":\"\"},\"PeriodicalIF\":7.4000,\"publicationDate\":\"2024-04-14\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Intelligent Manufacturing\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s10845-024-02372-9\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Intelligent Manufacturing","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s10845-024-02372-9","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Visual coating inspection framework via self-labeling and multi-stage deep learning strategies
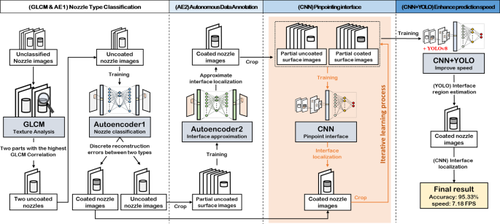
An instantaneous and precise coating inspection method is imperative to mitigate the risk of flaws, defects, and discrepancies on coated surfaces. While many studies have demonstrated the effectiveness of automated visual inspection (AVI) approaches enhanced by computer vision and deep learning, critical challenges exist for practical applications in the manufacturing domain. Computer vision has proven to be inflexible, demanding sophisticated algorithms for diverse feature extraction. In deep learning, supervised approaches are constrained by the need for annotated datasets, whereas unsupervised methods often result in lower performance. Addressing these challenges, this paper proposes a novel deep learning-based automated visual inspection (AVI) framework designed to minimize the necessity for extensive feature engineering, programming, and manual data annotation in classifying fuel injection nozzles and discerning their coating interfaces from scratch. This proposed framework comprises six integral components: It begins by distinguishing between coated and uncoated nozzles through gray level co-occurrence matrix (GLCM)-based texture analysis and autoencoder (AE)-based classification. This is followed by cropping surface images from uncoated nozzles, and then building an AE model to estimate the coating interface locations on coated nozzles. The next step involves generating autonomously annotated datasets derived from these estimated coating interface locations. Subsequently, a convolutional neural network (CNN)-based detection model is trained to accurately localize the coating interface locations. The final component focuses on enhancing model performance and trustworthiness. This framework demonstrated over 95% accuracy in pinpointing the coating interfaces within the error range of ± 6 pixels and processed at a rate of 7.18 images per second. Additionally, explainable artificial intelligence (XAI) techniques such as t-distributed stochastic neighbor embedding (t-SNE) and the integrated gradient substantiated the reliability of the models.
期刊介绍:
The Journal of Nonlinear Engineering aims to be a platform for sharing original research results in theoretical, experimental, practical, and applied nonlinear phenomena within engineering. It serves as a forum to exchange ideas and applications of nonlinear problems across various engineering disciplines. Articles are considered for publication if they explore nonlinearities in engineering systems, offering realistic mathematical modeling, utilizing nonlinearity for new designs, stabilizing systems, understanding system behavior through nonlinearity, optimizing systems based on nonlinear interactions, and developing algorithms to harness and leverage nonlinear elements.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


