Joonhyeok Moon, Min-Gwan Kim, Ok Hyun Kang, Heejong Lee, Ki-Yong Oh
{"title":"通过异质传感器测量集合检测实现自动高频感应钎焊","authors":"Joonhyeok Moon, Min-Gwan Kim, Ok Hyun Kang, Heejong Lee, Ki-Yong Oh","doi":"10.1007/s10845-024-02345-y","DOIUrl":null,"url":null,"abstract":"<p>This study proposes a new method to estimate the state of the high-frequency induction brazing by using the ensembled Rotational multi-pyramid-transformer tiny (RoMP-T<sup>2</sup>). The proposed method aims to identify the exact state of an induction brazing process because this information is effective to develop an automatic control system of an induction brazing machine. The proposed state estimation method features three characteristics. First, the method addresses a novel neural network for object detection titled the RoMP-T<sup>2</sup>. This neural network includes a rotational bounding box, multilevel and multiscale feature extraction module, and pyramid vision transformer, which effectively extract features highly correlated to an inducing brazing process from images. Second, the ensembled architecture of the RoMP-T<sup>2</sup> is addressed to extract features from both optical and thermal images. Bayesian optimization was also addressed to optimize hyperparameters in the ensembled architecture of the RoMP-T<sup>2</sup>. Hence, the ensembled RoMP-T<sup>2</sup> compensates features extracted from each optical and thermal images, accurately detecting an exact state and location of the filler material during an induction brazing process. Third, the proposed method addresses a cumulative alarm (CA) for determining the completion of the brazing process. The CA significantly reduces a false alarm rate, securing high safety and reliability when the proposed method is implemented to an automation process of the high-frequency induction brazing. An analysis on experiments with optical and thermal images reveals that the ensembled architecture secures the highest accuracy by compensating a limit of feature extraction from each optical and thermal image. The quantitative comparison of the RoMP-T<sup>2</sup> with other base-line neural networks confirms that the proposed neural network outperforms other neutral networks in both accuracy and robustness perspectives. Furthermore, systematic analysis on experiments reveals that the CA significantly decreases a false alarm rate and thereby increases productivity. These experimental evidences confirm that the proposed framework would be effective to develop an active management system of an induction brazing process, which would be indispensable for manufacturing process automation in a smart factory.</p>","PeriodicalId":16193,"journal":{"name":"Journal of Intelligent Manufacturing","volume":"11 1","pages":""},"PeriodicalIF":7.4000,"publicationDate":"2024-04-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Automatic high-frequency induction brazing through an ensembled detection with heterogenous sensor measurements\",\"authors\":\"Joonhyeok Moon, Min-Gwan Kim, Ok Hyun Kang, Heejong Lee, Ki-Yong Oh\",\"doi\":\"10.1007/s10845-024-02345-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This study proposes a new method to estimate the state of the high-frequency induction brazing by using the ensembled Rotational multi-pyramid-transformer tiny (RoMP-T<sup>2</sup>). The proposed method aims to identify the exact state of an induction brazing process because this information is effective to develop an automatic control system of an induction brazing machine. The proposed state estimation method features three characteristics. First, the method addresses a novel neural network for object detection titled the RoMP-T<sup>2</sup>. This neural network includes a rotational bounding box, multilevel and multiscale feature extraction module, and pyramid vision transformer, which effectively extract features highly correlated to an inducing brazing process from images. Second, the ensembled architecture of the RoMP-T<sup>2</sup> is addressed to extract features from both optical and thermal images. Bayesian optimization was also addressed to optimize hyperparameters in the ensembled architecture of the RoMP-T<sup>2</sup>. Hence, the ensembled RoMP-T<sup>2</sup> compensates features extracted from each optical and thermal images, accurately detecting an exact state and location of the filler material during an induction brazing process. Third, the proposed method addresses a cumulative alarm (CA) for determining the completion of the brazing process. The CA significantly reduces a false alarm rate, securing high safety and reliability when the proposed method is implemented to an automation process of the high-frequency induction brazing. An analysis on experiments with optical and thermal images reveals that the ensembled architecture secures the highest accuracy by compensating a limit of feature extraction from each optical and thermal image. The quantitative comparison of the RoMP-T<sup>2</sup> with other base-line neural networks confirms that the proposed neural network outperforms other neutral networks in both accuracy and robustness perspectives. Furthermore, systematic analysis on experiments reveals that the CA significantly decreases a false alarm rate and thereby increases productivity. These experimental evidences confirm that the proposed framework would be effective to develop an active management system of an induction brazing process, which would be indispensable for manufacturing process automation in a smart factory.</p>\",\"PeriodicalId\":16193,\"journal\":{\"name\":\"Journal of Intelligent Manufacturing\",\"volume\":\"11 1\",\"pages\":\"\"},\"PeriodicalIF\":7.4000,\"publicationDate\":\"2024-04-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Intelligent Manufacturing\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s10845-024-02345-y\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Intelligent Manufacturing","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s10845-024-02345-y","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Automatic high-frequency induction brazing through an ensembled detection with heterogenous sensor measurements
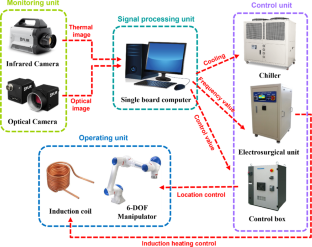
This study proposes a new method to estimate the state of the high-frequency induction brazing by using the ensembled Rotational multi-pyramid-transformer tiny (RoMP-T2). The proposed method aims to identify the exact state of an induction brazing process because this information is effective to develop an automatic control system of an induction brazing machine. The proposed state estimation method features three characteristics. First, the method addresses a novel neural network for object detection titled the RoMP-T2. This neural network includes a rotational bounding box, multilevel and multiscale feature extraction module, and pyramid vision transformer, which effectively extract features highly correlated to an inducing brazing process from images. Second, the ensembled architecture of the RoMP-T2 is addressed to extract features from both optical and thermal images. Bayesian optimization was also addressed to optimize hyperparameters in the ensembled architecture of the RoMP-T2. Hence, the ensembled RoMP-T2 compensates features extracted from each optical and thermal images, accurately detecting an exact state and location of the filler material during an induction brazing process. Third, the proposed method addresses a cumulative alarm (CA) for determining the completion of the brazing process. The CA significantly reduces a false alarm rate, securing high safety and reliability when the proposed method is implemented to an automation process of the high-frequency induction brazing. An analysis on experiments with optical and thermal images reveals that the ensembled architecture secures the highest accuracy by compensating a limit of feature extraction from each optical and thermal image. The quantitative comparison of the RoMP-T2 with other base-line neural networks confirms that the proposed neural network outperforms other neutral networks in both accuracy and robustness perspectives. Furthermore, systematic analysis on experiments reveals that the CA significantly decreases a false alarm rate and thereby increases productivity. These experimental evidences confirm that the proposed framework would be effective to develop an active management system of an induction brazing process, which would be indispensable for manufacturing process automation in a smart factory.
期刊介绍:
The Journal of Nonlinear Engineering aims to be a platform for sharing original research results in theoretical, experimental, practical, and applied nonlinear phenomena within engineering. It serves as a forum to exchange ideas and applications of nonlinear problems across various engineering disciplines. Articles are considered for publication if they explore nonlinearities in engineering systems, offering realistic mathematical modeling, utilizing nonlinearity for new designs, stabilizing systems, understanding system behavior through nonlinearity, optimizing systems based on nonlinear interactions, and developing algorithms to harness and leverage nonlinear elements.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


