Qiuxuan Wu, Liwei Pan, FuLin Du, ZhaoSheng Wu, XiaoNi Chi, FaRong Gao, Jian Wang, Anton A. Zhilenkov
{"title":"能游泳、双足行走和抓握的水下仿生机器人","authors":"Qiuxuan Wu, Liwei Pan, FuLin Du, ZhaoSheng Wu, XiaoNi Chi, FaRong Gao, Jian Wang, Anton A. Zhilenkov","doi":"10.1007/s42235-024-00494-7","DOIUrl":null,"url":null,"abstract":"<div><p>In developing and exploring extreme and harsh underwater environments, underwater robots can effectively replace humans to complete tasks. To meet the requirements of underwater flexible motion and comprehensive subsea operation, a novel octopus-inspired robot with eight soft limbs was designed and developed. This robot possesses the capabilities of underwater bipedal walking, multi-arm swimming, and grasping objects. To closely interact with the underwater seabed environment and minimize disturbance, the robot employs a cable-driven flexible arm for its walking in underwater floor through a bipedal walking mode. The multi-arm swimming offers a means of three-dimensional spatial movement, allowing the robot to swiftly explore and navigate over large areas, thereby enhancing its flexibility. Furthermore, the robot’s walking arm enables it to grasp and transport objects underwater, thereby enhancing its practicality in underwater environments. A simplified motion models and gait generation strategies were proposed for two modes of robot locomotion: swimming and walking, inspired by the movement characteristics of octopus-inspired multi-arm swimming and bipedal walking. Through experimental verification, the robot’s average speed of underwater bipedal walking reaches 7.26 cm/s, while the horizontal movement speed for multi-arm swimming is 8.6 cm/s.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1223 - 1237"},"PeriodicalIF":4.9000,"publicationDate":"2024-04-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s42235-024-00494-7.pdf","citationCount":"0","resultStr":"{\"title\":\"An Underwater Biomimetic Robot that can Swim, Bipedal Walk and Grasp\",\"authors\":\"Qiuxuan Wu, Liwei Pan, FuLin Du, ZhaoSheng Wu, XiaoNi Chi, FaRong Gao, Jian Wang, Anton A. Zhilenkov\",\"doi\":\"10.1007/s42235-024-00494-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In developing and exploring extreme and harsh underwater environments, underwater robots can effectively replace humans to complete tasks. To meet the requirements of underwater flexible motion and comprehensive subsea operation, a novel octopus-inspired robot with eight soft limbs was designed and developed. This robot possesses the capabilities of underwater bipedal walking, multi-arm swimming, and grasping objects. To closely interact with the underwater seabed environment and minimize disturbance, the robot employs a cable-driven flexible arm for its walking in underwater floor through a bipedal walking mode. The multi-arm swimming offers a means of three-dimensional spatial movement, allowing the robot to swiftly explore and navigate over large areas, thereby enhancing its flexibility. Furthermore, the robot’s walking arm enables it to grasp and transport objects underwater, thereby enhancing its practicality in underwater environments. A simplified motion models and gait generation strategies were proposed for two modes of robot locomotion: swimming and walking, inspired by the movement characteristics of octopus-inspired multi-arm swimming and bipedal walking. Through experimental verification, the robot’s average speed of underwater bipedal walking reaches 7.26 cm/s, while the horizontal movement speed for multi-arm swimming is 8.6 cm/s.</p></div>\",\"PeriodicalId\":614,\"journal\":{\"name\":\"Journal of Bionic Engineering\",\"volume\":\"21 3\",\"pages\":\"1223 - 1237\"},\"PeriodicalIF\":4.9000,\"publicationDate\":\"2024-04-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s42235-024-00494-7.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Bionic Engineering\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42235-024-00494-7\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00494-7","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
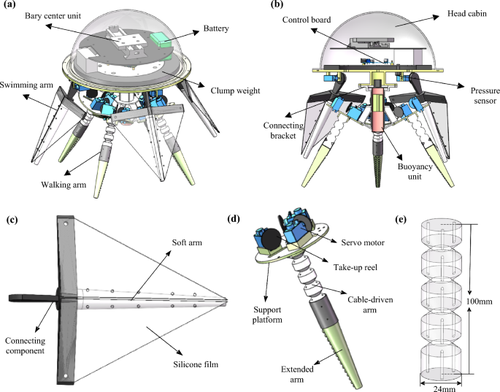
An Underwater Biomimetic Robot that can Swim, Bipedal Walk and Grasp
In developing and exploring extreme and harsh underwater environments, underwater robots can effectively replace humans to complete tasks. To meet the requirements of underwater flexible motion and comprehensive subsea operation, a novel octopus-inspired robot with eight soft limbs was designed and developed. This robot possesses the capabilities of underwater bipedal walking, multi-arm swimming, and grasping objects. To closely interact with the underwater seabed environment and minimize disturbance, the robot employs a cable-driven flexible arm for its walking in underwater floor through a bipedal walking mode. The multi-arm swimming offers a means of three-dimensional spatial movement, allowing the robot to swiftly explore and navigate over large areas, thereby enhancing its flexibility. Furthermore, the robot’s walking arm enables it to grasp and transport objects underwater, thereby enhancing its practicality in underwater environments. A simplified motion models and gait generation strategies were proposed for two modes of robot locomotion: swimming and walking, inspired by the movement characteristics of octopus-inspired multi-arm swimming and bipedal walking. Through experimental verification, the robot’s average speed of underwater bipedal walking reaches 7.26 cm/s, while the horizontal movement speed for multi-arm swimming is 8.6 cm/s.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


