Weijian Liu, Feng Guan, Fulin Zhang, Chenrui Wang, Wei Zheng, Lu Zhai, Zhaohua Lin, Chunbao Liu
{"title":"通过飞秒激光制造具有油触发温泽尔-滑动转变的生物启发型超疏铝合金表面","authors":"Weijian Liu, Feng Guan, Fulin Zhang, Chenrui Wang, Wei Zheng, Lu Zhai, Zhaohua Lin, Chunbao Liu","doi":"10.1007/s42235-024-00514-6","DOIUrl":null,"url":null,"abstract":"<div><p>Surface-tension-confined microfluidic devices are platforms for manipulating 2D droplets based on patterned surfaces with special wettability. They have great potential for various applications, but are still in the early stages of development and face some challenges that need to be addressed. This study, inspired by the Wenzel and slippery transition of rose petal, develops a Patterned Oil-triggered Wenzel-slippery Surface (POWS) to examine the microfluidic devices. A laser-chemical composite method is established to fabricate POWSs, which take rose-petal-like microstructures as wettability pattern and a superamphiphobic surface as the background. The prepared POWSs switched between high adhesion superhydrophobic state and the slippery liquid-infused surface state through adding or removing the lubricant oil. In the high adhesion superhydrophobic state, the droplets can be sticked on the surface. In the slippery liquid-infused state, the droplet can slide along the wettability pattern as the designed route. A POWS-based droplet reactor is further constructed, on which, the droplets can be remotely controlled to move, mix and react, as required. Such a POWS, which manipulates droplets with surface tension controlled by the switchable wettability patterns, would be a promising candidate to construct multiple surface-tension-confined microfluidic devices. In addition, the fabrication technique and design principle proposed here may aid the development of various field related to the bio-inspired surfaces, such as water collection, desalination and high throughput analysis, etc.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1375 - 1387"},"PeriodicalIF":4.9000,"publicationDate":"2024-03-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Fabrication of Bio-inspired Superamphiphobic Aluminum Alloy Surface with Oil-triggered Wenzel-Slippery Transition via Femtosecond Laser\",\"authors\":\"Weijian Liu, Feng Guan, Fulin Zhang, Chenrui Wang, Wei Zheng, Lu Zhai, Zhaohua Lin, Chunbao Liu\",\"doi\":\"10.1007/s42235-024-00514-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Surface-tension-confined microfluidic devices are platforms for manipulating 2D droplets based on patterned surfaces with special wettability. They have great potential for various applications, but are still in the early stages of development and face some challenges that need to be addressed. This study, inspired by the Wenzel and slippery transition of rose petal, develops a Patterned Oil-triggered Wenzel-slippery Surface (POWS) to examine the microfluidic devices. A laser-chemical composite method is established to fabricate POWSs, which take rose-petal-like microstructures as wettability pattern and a superamphiphobic surface as the background. The prepared POWSs switched between high adhesion superhydrophobic state and the slippery liquid-infused surface state through adding or removing the lubricant oil. In the high adhesion superhydrophobic state, the droplets can be sticked on the surface. In the slippery liquid-infused state, the droplet can slide along the wettability pattern as the designed route. A POWS-based droplet reactor is further constructed, on which, the droplets can be remotely controlled to move, mix and react, as required. Such a POWS, which manipulates droplets with surface tension controlled by the switchable wettability patterns, would be a promising candidate to construct multiple surface-tension-confined microfluidic devices. In addition, the fabrication technique and design principle proposed here may aid the development of various field related to the bio-inspired surfaces, such as water collection, desalination and high throughput analysis, etc.</p></div>\",\"PeriodicalId\":614,\"journal\":{\"name\":\"Journal of Bionic Engineering\",\"volume\":\"21 3\",\"pages\":\"1375 - 1387\"},\"PeriodicalIF\":4.9000,\"publicationDate\":\"2024-03-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Bionic Engineering\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42235-024-00514-6\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00514-6","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
Fabrication of Bio-inspired Superamphiphobic Aluminum Alloy Surface with Oil-triggered Wenzel-Slippery Transition via Femtosecond Laser
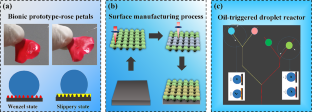
Surface-tension-confined microfluidic devices are platforms for manipulating 2D droplets based on patterned surfaces with special wettability. They have great potential for various applications, but are still in the early stages of development and face some challenges that need to be addressed. This study, inspired by the Wenzel and slippery transition of rose petal, develops a Patterned Oil-triggered Wenzel-slippery Surface (POWS) to examine the microfluidic devices. A laser-chemical composite method is established to fabricate POWSs, which take rose-petal-like microstructures as wettability pattern and a superamphiphobic surface as the background. The prepared POWSs switched between high adhesion superhydrophobic state and the slippery liquid-infused surface state through adding or removing the lubricant oil. In the high adhesion superhydrophobic state, the droplets can be sticked on the surface. In the slippery liquid-infused state, the droplet can slide along the wettability pattern as the designed route. A POWS-based droplet reactor is further constructed, on which, the droplets can be remotely controlled to move, mix and react, as required. Such a POWS, which manipulates droplets with surface tension controlled by the switchable wettability patterns, would be a promising candidate to construct multiple surface-tension-confined microfluidic devices. In addition, the fabrication technique and design principle proposed here may aid the development of various field related to the bio-inspired surfaces, such as water collection, desalination and high throughput analysis, etc.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


