带刚度静电控制环的微尺度非接触式感应悬浮装置的参数稳定性
IF 0.4
Q4 ENGINEERING, MECHANICAL
Journal of Machinery Manufacture and Reliability
Pub Date : 2024-03-27
DOI:10.1134/S1052618824010138
引用次数: 0
摘要
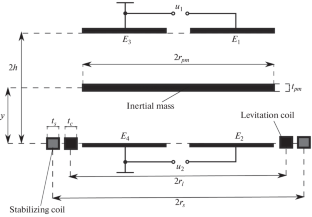
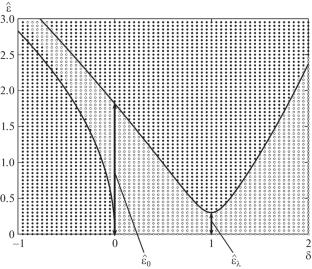
摘要 文章分析研究了位于具有有效控制刚度静电环的无接触电磁悬架中的未成形圆盘的参数振荡。根据非线性动力学的渐近方法,得到了悬浮物体静止位置过渡曲线的主参数共振区和次参数共振区的解析表达式。估算出了具有准零电磁刚度的非接触式悬浮物渐近稳定的系统参数。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Parametric Stability of Microscale Contactless Inductive Suspension with an Electrostatic Control Loop of Stiffness
In the article the parametric oscillations of an unreformed disk located in a contactless electromagnetic suspension with an electrostatic loop of the effective control stiffness were investigated analytically. The analytical expressions for the transition curves of the stationary position of the levitated object were obtained based on the asymptotical method of nonlinear dynamics for the areas of the main and secondary parametric resonances. The system parameters were estimated for which the contactless suspension with quasi-zero electromagnetic stiffness is asymptotically stable.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Journal of Machinery Manufacture and Reliability
ENGINEERING, MECHANICAL-
CiteScore
0.80
自引率
33.30%
发文量
61
期刊介绍:
Journal of Machinery Manufacture and Reliability is devoted to advances in machine design; CAD/CAM; experimental mechanics of machines, machine life expectancy, and reliability studies; machine dynamics and kinematics; vibration, acoustics, and stress/strain; wear resistance engineering; real-time machine operation diagnostics; robotic systems; new materials and manufacturing processes, and other topics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


