{"title":"托卡马克中不稳定垂直等离子体位置的自适应控制算法","authors":"Yu. V. Mitrishkin, S. L. Ivanova, K. S. Mukhtarov","doi":"10.1134/S0005117923120044","DOIUrl":null,"url":null,"abstract":"<p>The problem considered includes the development and modeling of an adaptive control algorithm for unstable vertical plasma positioning in a vertically elongated tokamak. At each iteration, a new PID controller is automatically synthesized for the evolving plasma model identified using the least squares method. The parameters of the feedback controller were computed based on the desired placement of the poles of the closed-loop control system in the left half-plane of the complex plane. The initial control system model utilized was a robust system synthesized using Quantitative Feedback Theory (QFT). The system was simulated on a real-time digital test bed (https://www.ipu.ru/plasma/about).</p>","PeriodicalId":55411,"journal":{"name":"Automation and Remote Control","volume":"84 12","pages":"1249 - 1258"},"PeriodicalIF":0.6000,"publicationDate":"2024-03-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Adaptive Control Algorithm for Unstable Vertical Plasma Position in Tokamak\",\"authors\":\"Yu. V. Mitrishkin, S. L. Ivanova, K. S. Mukhtarov\",\"doi\":\"10.1134/S0005117923120044\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The problem considered includes the development and modeling of an adaptive control algorithm for unstable vertical plasma positioning in a vertically elongated tokamak. At each iteration, a new PID controller is automatically synthesized for the evolving plasma model identified using the least squares method. The parameters of the feedback controller were computed based on the desired placement of the poles of the closed-loop control system in the left half-plane of the complex plane. The initial control system model utilized was a robust system synthesized using Quantitative Feedback Theory (QFT). The system was simulated on a real-time digital test bed (https://www.ipu.ru/plasma/about).</p>\",\"PeriodicalId\":55411,\"journal\":{\"name\":\"Automation and Remote Control\",\"volume\":\"84 12\",\"pages\":\"1249 - 1258\"},\"PeriodicalIF\":0.6000,\"publicationDate\":\"2024-03-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Automation and Remote Control\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1134/S0005117923120044\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automation and Remote Control","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1134/S0005117923120044","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Adaptive Control Algorithm for Unstable Vertical Plasma Position in Tokamak
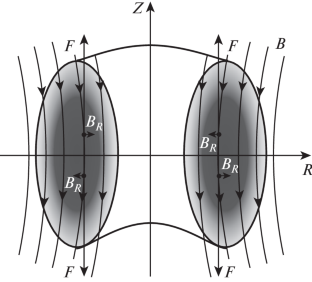
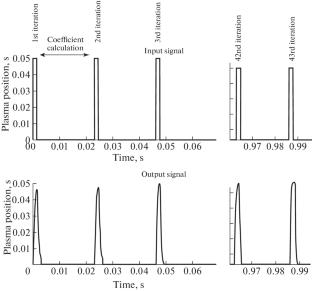
The problem considered includes the development and modeling of an adaptive control algorithm for unstable vertical plasma positioning in a vertically elongated tokamak. At each iteration, a new PID controller is automatically synthesized for the evolving plasma model identified using the least squares method. The parameters of the feedback controller were computed based on the desired placement of the poles of the closed-loop control system in the left half-plane of the complex plane. The initial control system model utilized was a robust system synthesized using Quantitative Feedback Theory (QFT). The system was simulated on a real-time digital test bed (https://www.ipu.ru/plasma/about).
期刊介绍:
Automation and Remote Control is one of the first journals on control theory. The scope of the journal is control theory problems and applications. The journal publishes reviews, original articles, and short communications (deterministic, stochastic, adaptive, and robust formulations) and its applications (computer control, components and instruments, process control, social and economy control, etc.).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


