漏斗控制与前馈控制策略相结合的实验验证
IF 2.4
2区 工程技术
Q2 MECHANICS
引用次数: 0
摘要
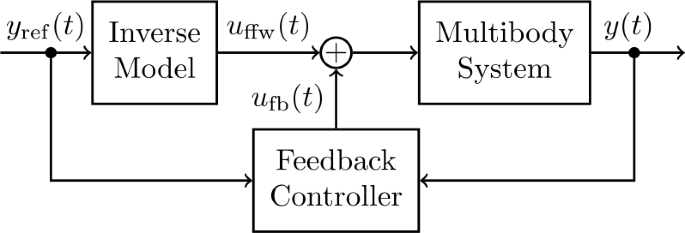
当前的工程设计趋势,如轻型机器和人机交互,往往会导致驱动力不足的系统。此类系统的输出轨迹跟踪是一个具有挑战性的控制问题。在此,我们采用一种双设计自由度控制方法,将漏斗反馈控制与基于伺服约束的前馈控制相结合。我们通过实验结果验证了这一方法,并证明增加前馈控制器可减轻漏斗控制器的缺点。我们还介绍了基于伺服约束的前馈控制器在最小相位系统上实时实施的新实验结果。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Experimental validation for the combination of funnel control with a feedforward control strategy
Current engineering design trends, such as lightweight machines and human–machine interaction, often lead to underactuated systems. Output trajectory tracking of such systems is a challenging control problem. Here, we use a two-design-degree of freedom control approach by combining funnel feedback control with feedforward control based on servo-constraints. We present experimental results to verify the approach and demonstrate that the addition of a feedforward controller mitigates drawbacks of the funnel controller. We also present new experimental results for the real-time implementation of a feedforward controller based on servo-constraints on a minimum phase system.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

CiteScore
6.00
自引率
17.60%
发文量
46
审稿时长
12 months
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


