{"title":"基于因子图的 PPP-RTK 可在城市环境中实现精确而稳健的定位","authors":"Xin Li, Xingxing Li, Xuanbin Wang, Hanyu Chang, Yuxuan Tan, Zhiheng Shen","doi":"10.1007/s00190-024-01828-3","DOIUrl":null,"url":null,"abstract":"<p>The PPP-RTK system, which is capable of providing a centimeter-level real-time positioning service for an unlimited number of users, is becoming a promising tool in mass-market applications such as smartphones, the Internet of Things (IoT), and the automotive industry. The extended Kalman filter (EKF) is the conventional method for parameter estimation in the existing PPP-RTK system. Recently, an alternative method known as factor graph optimization (FGO), which fully leverages the time correlation among current and historical measurements, has the potential to further improve the accuracy and robustness of PPP-RTK solutions. In this contribution, a factor graph optimization-based PPP-RTK framework is developed, where raw pseudorange, phase measurements, precise atmospheric corrections, and time-differenced carrier-phase (TDCP) measurements serve as factors in FGO estimators. The continuously tracked phase ambiguities are estimated as the time-invariant state node and propagated by marginalization while ambiguity resolution is conducted independently between epochs. A second optimization process with the utilization of ambiguity-resolved solutions and time-differenced carrier-phase (TDCP) measurements is conducted to further improve the reliability of positioning results. The effectiveness of the proposed method is evaluated by vehicular tests in urban environments. Results indicate that the FGO method could improve the performance of ambiguity resolution by reducing the ambiguity search space and increasing the ratio values, leading to a significant accuracy improvement of 55% in an open-sky environment compared to the traditional EKF-based method. Furthermore, in GNSS signal partly block scenes, the FGO-based PPP-RTK is capable of obtaining more robust and accurate positioning solutions with fewer outliers compared to the EKF method.</p>","PeriodicalId":54822,"journal":{"name":"Journal of Geodesy","volume":"9 1","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2024-03-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Factor graph-based PPP-RTK for accurate and robust positioning in urban environments\",\"authors\":\"Xin Li, Xingxing Li, Xuanbin Wang, Hanyu Chang, Yuxuan Tan, Zhiheng Shen\",\"doi\":\"10.1007/s00190-024-01828-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The PPP-RTK system, which is capable of providing a centimeter-level real-time positioning service for an unlimited number of users, is becoming a promising tool in mass-market applications such as smartphones, the Internet of Things (IoT), and the automotive industry. The extended Kalman filter (EKF) is the conventional method for parameter estimation in the existing PPP-RTK system. Recently, an alternative method known as factor graph optimization (FGO), which fully leverages the time correlation among current and historical measurements, has the potential to further improve the accuracy and robustness of PPP-RTK solutions. In this contribution, a factor graph optimization-based PPP-RTK framework is developed, where raw pseudorange, phase measurements, precise atmospheric corrections, and time-differenced carrier-phase (TDCP) measurements serve as factors in FGO estimators. The continuously tracked phase ambiguities are estimated as the time-invariant state node and propagated by marginalization while ambiguity resolution is conducted independently between epochs. A second optimization process with the utilization of ambiguity-resolved solutions and time-differenced carrier-phase (TDCP) measurements is conducted to further improve the reliability of positioning results. The effectiveness of the proposed method is evaluated by vehicular tests in urban environments. Results indicate that the FGO method could improve the performance of ambiguity resolution by reducing the ambiguity search space and increasing the ratio values, leading to a significant accuracy improvement of 55% in an open-sky environment compared to the traditional EKF-based method. Furthermore, in GNSS signal partly block scenes, the FGO-based PPP-RTK is capable of obtaining more robust and accurate positioning solutions with fewer outliers compared to the EKF method.</p>\",\"PeriodicalId\":54822,\"journal\":{\"name\":\"Journal of Geodesy\",\"volume\":\"9 1\",\"pages\":\"\"},\"PeriodicalIF\":3.9000,\"publicationDate\":\"2024-03-18\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Geodesy\",\"FirstCategoryId\":\"89\",\"ListUrlMain\":\"https://doi.org/10.1007/s00190-024-01828-3\",\"RegionNum\":2,\"RegionCategory\":\"地球科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"GEOCHEMISTRY & GEOPHYSICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Geodesy","FirstCategoryId":"89","ListUrlMain":"https://doi.org/10.1007/s00190-024-01828-3","RegionNum":2,"RegionCategory":"地球科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"GEOCHEMISTRY & GEOPHYSICS","Score":null,"Total":0}
Factor graph-based PPP-RTK for accurate and robust positioning in urban environments
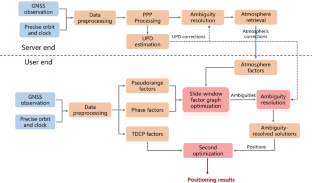
The PPP-RTK system, which is capable of providing a centimeter-level real-time positioning service for an unlimited number of users, is becoming a promising tool in mass-market applications such as smartphones, the Internet of Things (IoT), and the automotive industry. The extended Kalman filter (EKF) is the conventional method for parameter estimation in the existing PPP-RTK system. Recently, an alternative method known as factor graph optimization (FGO), which fully leverages the time correlation among current and historical measurements, has the potential to further improve the accuracy and robustness of PPP-RTK solutions. In this contribution, a factor graph optimization-based PPP-RTK framework is developed, where raw pseudorange, phase measurements, precise atmospheric corrections, and time-differenced carrier-phase (TDCP) measurements serve as factors in FGO estimators. The continuously tracked phase ambiguities are estimated as the time-invariant state node and propagated by marginalization while ambiguity resolution is conducted independently between epochs. A second optimization process with the utilization of ambiguity-resolved solutions and time-differenced carrier-phase (TDCP) measurements is conducted to further improve the reliability of positioning results. The effectiveness of the proposed method is evaluated by vehicular tests in urban environments. Results indicate that the FGO method could improve the performance of ambiguity resolution by reducing the ambiguity search space and increasing the ratio values, leading to a significant accuracy improvement of 55% in an open-sky environment compared to the traditional EKF-based method. Furthermore, in GNSS signal partly block scenes, the FGO-based PPP-RTK is capable of obtaining more robust and accurate positioning solutions with fewer outliers compared to the EKF method.
期刊介绍:
The Journal of Geodesy is an international journal concerned with the study of scientific problems of geodesy and related interdisciplinary sciences. Peer-reviewed papers are published on theoretical or modeling studies, and on results of experiments and interpretations. Besides original research papers, the journal includes commissioned review papers on topical subjects and special issues arising from chosen scientific symposia or workshops. The journal covers the whole range of geodetic science and reports on theoretical and applied studies in research areas such as:
-Positioning
-Reference frame
-Geodetic networks
-Modeling and quality control
-Space geodesy
-Remote sensing
-Gravity fields
-Geodynamics

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


