{"title":"近距离目标下遮挡和重叠苹果的检测方法","authors":"Yuhui Yuan, Hubin Liu, Zengrong Yang, Jianhua Zheng, Junhui Li, Longlian Zhao","doi":"10.1007/s10044-024-01222-x","DOIUrl":null,"url":null,"abstract":"<p>Accurate and rapid identification and location of apples contributes to speeding up automation harvesting. However, in unstructured orchard environments, it is common for apples to be overlapped and occluded by branches and leaves, which interferes with apple identification and localization. In order to quickly reconstruct the fruits under overlapping and occlusion conditions, an adaptive radius selection strategy based on random sample consensus algorithm (ARSS-RANSAC) was proposed. Firstly, the edge of apple in the image was obtained by using image preprocessing method. Secondly, an adaptive radius selection strategy was proposed, which is based on fruit shape characteristics. The fruit initial radius was obtained through horizontal or vertical scanning. Then, combined with RANSAC algorithm to select effective contour points by the determined radius, and the circle center coordinates were obtained. Finally, fitting the circle according to the selected valid contour and achieving the recognition and localization of overlapped and occluded apples. 175 apple images with different overlaps and branches and leaves occlusion were applied to verify the effectiveness of algorithm. The evaluation indicators of overlap rate, average false-positive rate, average false-negative rate, and average segmentation error of ARSS-RANSAC were improved compared with the classical Hough transform method. The detection time of a single image was less than 50 ms, which can meet requirements of real-time target detection. The experimental results show that the ARSS-RANSAC algorithm can quickly and accurately identify and locate occluded and overlapped apples and is expected to be applied to harvesting robots of apple and other round fruits.</p>","PeriodicalId":54639,"journal":{"name":"Pattern Analysis and Applications","volume":"76 1","pages":""},"PeriodicalIF":3.7000,"publicationDate":"2024-02-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A detection method for occluded and overlapped apples under close-range targets\",\"authors\":\"Yuhui Yuan, Hubin Liu, Zengrong Yang, Jianhua Zheng, Junhui Li, Longlian Zhao\",\"doi\":\"10.1007/s10044-024-01222-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Accurate and rapid identification and location of apples contributes to speeding up automation harvesting. However, in unstructured orchard environments, it is common for apples to be overlapped and occluded by branches and leaves, which interferes with apple identification and localization. In order to quickly reconstruct the fruits under overlapping and occlusion conditions, an adaptive radius selection strategy based on random sample consensus algorithm (ARSS-RANSAC) was proposed. Firstly, the edge of apple in the image was obtained by using image preprocessing method. Secondly, an adaptive radius selection strategy was proposed, which is based on fruit shape characteristics. The fruit initial radius was obtained through horizontal or vertical scanning. Then, combined with RANSAC algorithm to select effective contour points by the determined radius, and the circle center coordinates were obtained. Finally, fitting the circle according to the selected valid contour and achieving the recognition and localization of overlapped and occluded apples. 175 apple images with different overlaps and branches and leaves occlusion were applied to verify the effectiveness of algorithm. The evaluation indicators of overlap rate, average false-positive rate, average false-negative rate, and average segmentation error of ARSS-RANSAC were improved compared with the classical Hough transform method. The detection time of a single image was less than 50 ms, which can meet requirements of real-time target detection. The experimental results show that the ARSS-RANSAC algorithm can quickly and accurately identify and locate occluded and overlapped apples and is expected to be applied to harvesting robots of apple and other round fruits.</p>\",\"PeriodicalId\":54639,\"journal\":{\"name\":\"Pattern Analysis and Applications\",\"volume\":\"76 1\",\"pages\":\"\"},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2024-02-28\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Pattern Analysis and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s10044-024-01222-x\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Pattern Analysis and Applications","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s10044-024-01222-x","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
A detection method for occluded and overlapped apples under close-range targets
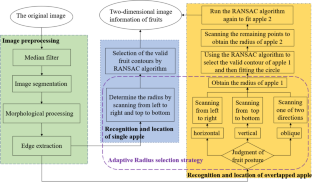
Accurate and rapid identification and location of apples contributes to speeding up automation harvesting. However, in unstructured orchard environments, it is common for apples to be overlapped and occluded by branches and leaves, which interferes with apple identification and localization. In order to quickly reconstruct the fruits under overlapping and occlusion conditions, an adaptive radius selection strategy based on random sample consensus algorithm (ARSS-RANSAC) was proposed. Firstly, the edge of apple in the image was obtained by using image preprocessing method. Secondly, an adaptive radius selection strategy was proposed, which is based on fruit shape characteristics. The fruit initial radius was obtained through horizontal or vertical scanning. Then, combined with RANSAC algorithm to select effective contour points by the determined radius, and the circle center coordinates were obtained. Finally, fitting the circle according to the selected valid contour and achieving the recognition and localization of overlapped and occluded apples. 175 apple images with different overlaps and branches and leaves occlusion were applied to verify the effectiveness of algorithm. The evaluation indicators of overlap rate, average false-positive rate, average false-negative rate, and average segmentation error of ARSS-RANSAC were improved compared with the classical Hough transform method. The detection time of a single image was less than 50 ms, which can meet requirements of real-time target detection. The experimental results show that the ARSS-RANSAC algorithm can quickly and accurately identify and locate occluded and overlapped apples and is expected to be applied to harvesting robots of apple and other round fruits.
期刊介绍:
The journal publishes high quality articles in areas of fundamental research in intelligent pattern analysis and applications in computer science and engineering. It aims to provide a forum for original research which describes novel pattern analysis techniques and industrial applications of the current technology. In addition, the journal will also publish articles on pattern analysis applications in medical imaging. The journal solicits articles that detail new technology and methods for pattern recognition and analysis in applied domains including, but not limited to, computer vision and image processing, speech analysis, robotics, multimedia, document analysis, character recognition, knowledge engineering for pattern recognition, fractal analysis, and intelligent control. The journal publishes articles on the use of advanced pattern recognition and analysis methods including statistical techniques, neural networks, genetic algorithms, fuzzy pattern recognition, machine learning, and hardware implementations which are either relevant to the development of pattern analysis as a research area or detail novel pattern analysis applications. Papers proposing new classifier systems or their development, pattern analysis systems for real-time applications, fuzzy and temporal pattern recognition and uncertainty management in applied pattern recognition are particularly solicited.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


