Benjamin Camblor, David Daney, Lucas Joseph, Jean-Marc Salotti
{"title":"在人机协作中通过投影能力处理注意力共享问题","authors":"Benjamin Camblor, David Daney, Lucas Joseph, Jean-Marc Salotti","doi":"10.1007/s12369-024-01101-9","DOIUrl":null,"url":null,"abstract":"<p>The link between situation awareness (SA) and the distribution of human attention, has been explored within a human robot collaboration framework. According to Endsley (1995), SA is divided into three levels: perception, comprehension and projection. It is involved in the process of making decisions and carrying out actions in a dynamic environment. This work investigates three hypotheses. First, that the ability to project a robot’s future actions improves performance in a collaborative task. Second, that the more participants are involved in tasks in a collaborative environment, the better their SA will be. Finally, that the use of a robot’s non-verbal communication motions attracts a participant’s attention more promptly than if the robot remains motionless. A within-participants study has been designed to investigate our three hypotheses. Participants were asked to perform a collaborative task with a robot. It required them to assist the robot at different moments while they were engaged in a distracting task that was catching their attention (tower of Hanoi puzzle). These moments could either be anticipated and taken into account in the human decision-making and action loop or not. Lastly, the robot could either use non-verbal communication gestures to draw human attention or not. The results have demonstrated the significance of considering the human capability to project a robot next actions in their own personal attention management. Moreover, the subjective measures showed no difference in the assessment of SA, in contrast to the objective measures, which are in line with our second hypothesis. Finally, it seems that standing stationary can be considered a gesture of non-verbal communication. In the present work, robot waiting was more salient in capturing human attention when the robot remained motionless rather than making a signaling motion.</p>","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"5 1","pages":""},"PeriodicalIF":3.8000,"publicationDate":"2024-02-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Attention Sharing Handling Through Projection Capability Within Human–Robot Collaboration\",\"authors\":\"Benjamin Camblor, David Daney, Lucas Joseph, Jean-Marc Salotti\",\"doi\":\"10.1007/s12369-024-01101-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The link between situation awareness (SA) and the distribution of human attention, has been explored within a human robot collaboration framework. According to Endsley (1995), SA is divided into three levels: perception, comprehension and projection. It is involved in the process of making decisions and carrying out actions in a dynamic environment. This work investigates three hypotheses. First, that the ability to project a robot’s future actions improves performance in a collaborative task. Second, that the more participants are involved in tasks in a collaborative environment, the better their SA will be. Finally, that the use of a robot’s non-verbal communication motions attracts a participant’s attention more promptly than if the robot remains motionless. A within-participants study has been designed to investigate our three hypotheses. Participants were asked to perform a collaborative task with a robot. It required them to assist the robot at different moments while they were engaged in a distracting task that was catching their attention (tower of Hanoi puzzle). These moments could either be anticipated and taken into account in the human decision-making and action loop or not. Lastly, the robot could either use non-verbal communication gestures to draw human attention or not. The results have demonstrated the significance of considering the human capability to project a robot next actions in their own personal attention management. Moreover, the subjective measures showed no difference in the assessment of SA, in contrast to the objective measures, which are in line with our second hypothesis. Finally, it seems that standing stationary can be considered a gesture of non-verbal communication. In the present work, robot waiting was more salient in capturing human attention when the robot remained motionless rather than making a signaling motion.</p>\",\"PeriodicalId\":14361,\"journal\":{\"name\":\"International Journal of Social Robotics\",\"volume\":\"5 1\",\"pages\":\"\"},\"PeriodicalIF\":3.8000,\"publicationDate\":\"2024-02-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Social Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s12369-024-01101-9\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s12369-024-01101-9","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
摘要
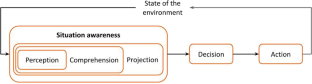
人们在人类机器人协作框架内探讨了情境意识(SA)与人类注意力分配之间的联系。根据 Endsley(1995 年)的观点,情景意识分为三个层次:感知、理解和预测。它涉及在动态环境中做出决策和执行行动的过程。本研究提出了三个假设。首先,预测机器人未来行动的能力会提高机器人在协作任务中的表现。其次,参与协作环境任务的人数越多,他们的 SA 能力就越强。最后,使用机器人的非语言交流动作比机器人一动不动更能迅速吸引参与者的注意力。为了研究我们的三个假设,我们设计了一项参与者内部研究。参与者被要求与机器人共同完成一项协作任务。该任务要求参与者在不同的时刻协助机器人,而此时他们正在从事一项分散注意力的任务(河内塔拼图)。在人类决策和行动循环中,这些时刻既可以被预测和考虑到,也可以不被预测和考虑到。最后,机器人可以使用非语言交流手势来吸引人类的注意力,也可以不这样做。结果表明,考虑人类在个人注意力管理中预测机器人下一步行动的能力具有重要意义。此外,主观测量结果表明,与客观测量结果相比,对 SA 的评估没有差异,这符合我们的第二个假设。最后,站立不动似乎可以被视为一种非语言交流的姿态。在本研究中,当机器人一动不动而不是做出示意动作时,机器人的等待更能吸引人类的注意力。
Attention Sharing Handling Through Projection Capability Within Human–Robot Collaboration
The link between situation awareness (SA) and the distribution of human attention, has been explored within a human robot collaboration framework. According to Endsley (1995), SA is divided into three levels: perception, comprehension and projection. It is involved in the process of making decisions and carrying out actions in a dynamic environment. This work investigates three hypotheses. First, that the ability to project a robot’s future actions improves performance in a collaborative task. Second, that the more participants are involved in tasks in a collaborative environment, the better their SA will be. Finally, that the use of a robot’s non-verbal communication motions attracts a participant’s attention more promptly than if the robot remains motionless. A within-participants study has been designed to investigate our three hypotheses. Participants were asked to perform a collaborative task with a robot. It required them to assist the robot at different moments while they were engaged in a distracting task that was catching their attention (tower of Hanoi puzzle). These moments could either be anticipated and taken into account in the human decision-making and action loop or not. Lastly, the robot could either use non-verbal communication gestures to draw human attention or not. The results have demonstrated the significance of considering the human capability to project a robot next actions in their own personal attention management. Moreover, the subjective measures showed no difference in the assessment of SA, in contrast to the objective measures, which are in line with our second hypothesis. Finally, it seems that standing stationary can be considered a gesture of non-verbal communication. In the present work, robot waiting was more salient in capturing human attention when the robot remained motionless rather than making a signaling motion.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


