集成了软生物电子学和深度学习的智能上肢外骨骼,可实现意图驱动的增强功能
IF 12.3
1区 材料科学
Q1 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 0
摘要
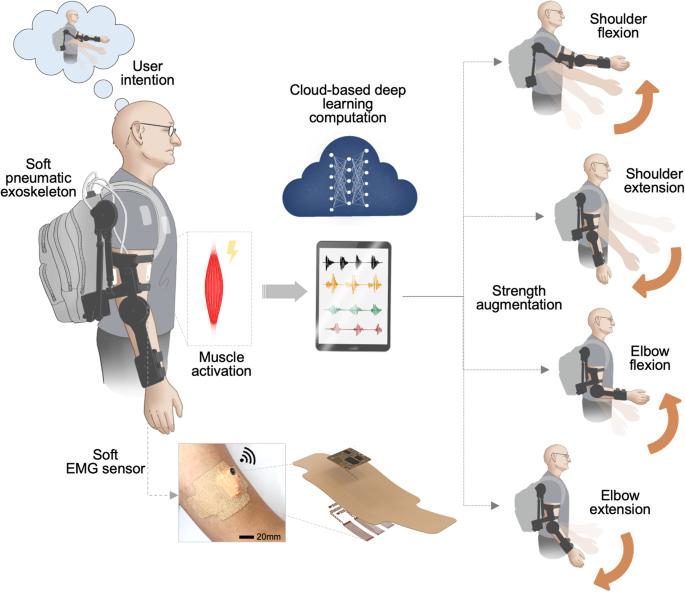
年龄增长和中风导致肌肉骨骼力量下降,从而降低了使用上肢完成日常人类任务的能力。在此,我们介绍一种智能上肢外骨骼系统,该系统利用深度学习预测人类增强力量的意图。嵌入式软性可穿戴传感器通过收集实时肌肉活动来提供感官反馈,同时通过计算来确定用户的意图动作。基于云的深度学习以 500-550 毫秒的响应速度预测了四个上肢关节的运动,平均准确率为 96.2%,这表明外骨骼只需根据人类意图进行操作。此外,软气动装置阵列可提供 897 牛顿的力,同时产生 87 毫米的最大位移,从而辅助预期运动。与无辅助外骨骼相比,意图驱动外骨骼可将人类肌肉活动平均减少 3.7 倍。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Intelligent upper-limb exoskeleton integrated with soft bioelectronics and deep learning for intention-driven augmentation
The age and stroke-associated decline in musculoskeletal strength degrades the ability to perform daily human tasks using the upper extremities. Here, we introduce an intelligent upper-limb exoskeleton system that utilizes deep learning to predict human intention for strength augmentation. The embedded soft wearable sensors provide sensory feedback by collecting real-time muscle activities, which are simultaneously computed to determine the user’s intended movement. Cloud-based deep learning predicts four upper-limb joint motions with an average accuracy of 96.2% at a 500–550 ms response rate, suggesting that the exoskeleton operates just by human intention. In addition, an array of soft pneumatics assists the intended movements by providing 897 newtons of force while generating a displacement of 87 mm at maximum. The intent-driven exoskeleton can reduce human muscle activities by 3.7 times on average compared to the unassisted exoskeleton.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

npj Flexible Electronics
Multiple-
CiteScore
17.10
自引率
4.80%
发文量
91
审稿时长
6 weeks
期刊介绍:
npj Flexible Electronics is an online-only and open access journal, which publishes high-quality papers related to flexible electronic systems, including plastic electronics and emerging materials, new device design and fabrication technologies, and applications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


