Gege Wu , Wei Xian , Qing You , Jingjing Zhang , Xiaoyuan Chen
{"title":"声学机器人:用于精确生物医学应用的智能声动力微型/纳米游泳器","authors":"Gege Wu , Wei Xian , Qing You , Jingjing Zhang , Xiaoyuan Chen","doi":"10.1016/j.addr.2024.115201","DOIUrl":null,"url":null,"abstract":"<div><p>Although nanotechnology has evolutionarily progressed in biomedical field over the past decades, achieving satisfactory therapeutic effects remains difficult with limited delivery efficiency. Ultrasound could provide a deep penetration and maneuverable actuation to efficiently power micro-/nanoswimmers with little harm, offering an emerging and fascinating alternative to the active delivery platform. Recent advances in novel fabrication, controllable concepts like intelligent swarm and the integration of hybrid propulsions have promoted its function and potential for medical applications. In this review, we will summarize the mechanisms and types of ultrasonically propelled micro/nanorobots (termed here as “AcousticRobots”), including the interactions between AcousticRobots and acoustic field, practical design considerations (<em>e.g.</em>, component, size, shape), the synthetic methods, surface modification, controllable behaviors, and the advantages when combined with other propulsion approaches. The representative biomedical applications of functional AcousticRobots are also highlighted, including drug delivery, invasive surgery, eradication on the surrounding bio-environment, cell manipulation, detection, and imaging, <em>etc.</em> We conclude by discussing the challenges and outlook of AcousticRobots in biomedical applications.</p></div>","PeriodicalId":7254,"journal":{"name":"Advanced drug delivery reviews","volume":"207 ","pages":"Article 115201"},"PeriodicalIF":15.2000,"publicationDate":"2024-02-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"AcousticRobots: Smart acoustically powered micro-/nanoswimmers for precise biomedical applications\",\"authors\":\"Gege Wu , Wei Xian , Qing You , Jingjing Zhang , Xiaoyuan Chen\",\"doi\":\"10.1016/j.addr.2024.115201\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Although nanotechnology has evolutionarily progressed in biomedical field over the past decades, achieving satisfactory therapeutic effects remains difficult with limited delivery efficiency. Ultrasound could provide a deep penetration and maneuverable actuation to efficiently power micro-/nanoswimmers with little harm, offering an emerging and fascinating alternative to the active delivery platform. Recent advances in novel fabrication, controllable concepts like intelligent swarm and the integration of hybrid propulsions have promoted its function and potential for medical applications. In this review, we will summarize the mechanisms and types of ultrasonically propelled micro/nanorobots (termed here as “AcousticRobots”), including the interactions between AcousticRobots and acoustic field, practical design considerations (<em>e.g.</em>, component, size, shape), the synthetic methods, surface modification, controllable behaviors, and the advantages when combined with other propulsion approaches. The representative biomedical applications of functional AcousticRobots are also highlighted, including drug delivery, invasive surgery, eradication on the surrounding bio-environment, cell manipulation, detection, and imaging, <em>etc.</em> We conclude by discussing the challenges and outlook of AcousticRobots in biomedical applications.</p></div>\",\"PeriodicalId\":7254,\"journal\":{\"name\":\"Advanced drug delivery reviews\",\"volume\":\"207 \",\"pages\":\"Article 115201\"},\"PeriodicalIF\":15.2000,\"publicationDate\":\"2024-02-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced drug delivery reviews\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0169409X24000231\",\"RegionNum\":1,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"PHARMACOLOGY & PHARMACY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced drug delivery reviews","FirstCategoryId":"3","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0169409X24000231","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"PHARMACOLOGY & PHARMACY","Score":null,"Total":0}
AcousticRobots: Smart acoustically powered micro-/nanoswimmers for precise biomedical applications
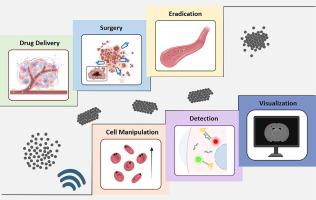
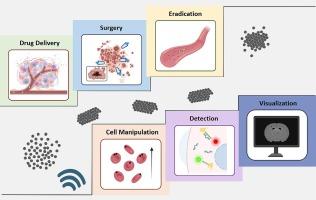
Although nanotechnology has evolutionarily progressed in biomedical field over the past decades, achieving satisfactory therapeutic effects remains difficult with limited delivery efficiency. Ultrasound could provide a deep penetration and maneuverable actuation to efficiently power micro-/nanoswimmers with little harm, offering an emerging and fascinating alternative to the active delivery platform. Recent advances in novel fabrication, controllable concepts like intelligent swarm and the integration of hybrid propulsions have promoted its function and potential for medical applications. In this review, we will summarize the mechanisms and types of ultrasonically propelled micro/nanorobots (termed here as “AcousticRobots”), including the interactions between AcousticRobots and acoustic field, practical design considerations (e.g., component, size, shape), the synthetic methods, surface modification, controllable behaviors, and the advantages when combined with other propulsion approaches. The representative biomedical applications of functional AcousticRobots are also highlighted, including drug delivery, invasive surgery, eradication on the surrounding bio-environment, cell manipulation, detection, and imaging, etc. We conclude by discussing the challenges and outlook of AcousticRobots in biomedical applications.
期刊介绍:
The aim of the Journal is to provide a forum for the critical analysis of advanced drug and gene delivery systems and their applications in human and veterinary medicine. The Journal has a broad scope, covering the key issues for effective drug and gene delivery, from administration to site-specific delivery.
In general, the Journal publishes review articles in a Theme Issue format. Each Theme Issue provides a comprehensive and critical examination of current and emerging research on the design and development of advanced drug and gene delivery systems and their application to experimental and clinical therapeutics. The goal is to illustrate the pivotal role of a multidisciplinary approach to modern drug delivery, encompassing the application of sound biological and physicochemical principles to the engineering of drug delivery systems to meet the therapeutic need at hand. Importantly the Editorial Team of ADDR asks that the authors effectively window the extensive volume of literature, pick the important contributions and explain their importance, produce a forward looking identification of the challenges facing the field and produce a Conclusions section with expert recommendations to address the issues.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


