Jonghwa Park, Youngoh Lee, Seungse Cho, Ayoung Choe, Jeonghee Yeom, Yun Goo Ro, Jinyoung Kim, Dong-hee Kang, Seungjae Lee and Hyunhyub Ko*,
{"title":"用于可穿戴式人机界面的软传感器和执行器。","authors":"Jonghwa Park, Youngoh Lee, Seungse Cho, Ayoung Choe, Jeonghee Yeom, Yun Goo Ro, Jinyoung Kim, Dong-hee Kang, Seungjae Lee and Hyunhyub Ko*, ","doi":"10.1021/acs.chemrev.3c00356","DOIUrl":null,"url":null,"abstract":"<p >Haptic human–machine interfaces (HHMIs) combine tactile sensation and haptic feedback to allow humans to interact closely with machines and robots, providing immersive experiences and convenient lifestyles. Significant progress has been made in developing wearable sensors that accurately detect physical and electrophysiological stimuli with improved softness, functionality, reliability, and selectivity. In addition, soft actuating systems have been developed to provide high-quality haptic feedback by precisely controlling force, displacement, frequency, and spatial resolution. In this Review, we discuss the latest technological advances of soft sensors and actuators for the demonstration of wearable HHMIs. We particularly focus on highlighting material and structural approaches that enable desired sensing and feedback properties necessary for effective wearable HHMIs. Furthermore, promising practical applications of current HHMI technology in various areas such as the metaverse, robotics, and user-interactive devices are discussed in detail. Finally, this Review further concludes by discussing the outlook for next-generation HHMI technology.</p>","PeriodicalId":32,"journal":{"name":"Chemical Reviews","volume":"124 4","pages":"1464–1534"},"PeriodicalIF":55.8000,"publicationDate":"2024-02-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Soft Sensors and Actuators for Wearable Human–Machine Interfaces\",\"authors\":\"Jonghwa Park, Youngoh Lee, Seungse Cho, Ayoung Choe, Jeonghee Yeom, Yun Goo Ro, Jinyoung Kim, Dong-hee Kang, Seungjae Lee and Hyunhyub Ko*, \",\"doi\":\"10.1021/acs.chemrev.3c00356\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Haptic human–machine interfaces (HHMIs) combine tactile sensation and haptic feedback to allow humans to interact closely with machines and robots, providing immersive experiences and convenient lifestyles. Significant progress has been made in developing wearable sensors that accurately detect physical and electrophysiological stimuli with improved softness, functionality, reliability, and selectivity. In addition, soft actuating systems have been developed to provide high-quality haptic feedback by precisely controlling force, displacement, frequency, and spatial resolution. In this Review, we discuss the latest technological advances of soft sensors and actuators for the demonstration of wearable HHMIs. We particularly focus on highlighting material and structural approaches that enable desired sensing and feedback properties necessary for effective wearable HHMIs. Furthermore, promising practical applications of current HHMI technology in various areas such as the metaverse, robotics, and user-interactive devices are discussed in detail. Finally, this Review further concludes by discussing the outlook for next-generation HHMI technology.</p>\",\"PeriodicalId\":32,\"journal\":{\"name\":\"Chemical Reviews\",\"volume\":\"124 4\",\"pages\":\"1464–1534\"},\"PeriodicalIF\":55.8000,\"publicationDate\":\"2024-02-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Chemical Reviews\",\"FirstCategoryId\":\"92\",\"ListUrlMain\":\"https://pubs.acs.org/doi/10.1021/acs.chemrev.3c00356\",\"RegionNum\":1,\"RegionCategory\":\"化学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Chemical Reviews","FirstCategoryId":"92","ListUrlMain":"https://pubs.acs.org/doi/10.1021/acs.chemrev.3c00356","RegionNum":1,"RegionCategory":"化学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
Soft Sensors and Actuators for Wearable Human–Machine Interfaces
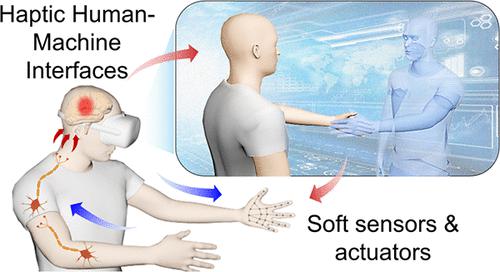
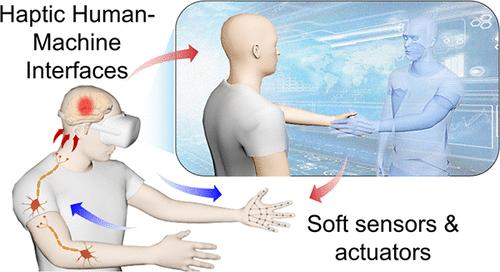
Haptic human–machine interfaces (HHMIs) combine tactile sensation and haptic feedback to allow humans to interact closely with machines and robots, providing immersive experiences and convenient lifestyles. Significant progress has been made in developing wearable sensors that accurately detect physical and electrophysiological stimuli with improved softness, functionality, reliability, and selectivity. In addition, soft actuating systems have been developed to provide high-quality haptic feedback by precisely controlling force, displacement, frequency, and spatial resolution. In this Review, we discuss the latest technological advances of soft sensors and actuators for the demonstration of wearable HHMIs. We particularly focus on highlighting material and structural approaches that enable desired sensing and feedback properties necessary for effective wearable HHMIs. Furthermore, promising practical applications of current HHMI technology in various areas such as the metaverse, robotics, and user-interactive devices are discussed in detail. Finally, this Review further concludes by discussing the outlook for next-generation HHMI technology.
期刊介绍:
Chemical Reviews is a highly regarded and highest-ranked journal covering the general topic of chemistry. Its mission is to provide comprehensive, authoritative, critical, and readable reviews of important recent research in organic, inorganic, physical, analytical, theoretical, and biological chemistry.
Since 1985, Chemical Reviews has also published periodic thematic issues that focus on a single theme or direction of emerging research.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


