Bin Zhang, Yuyang Xia, Rongrong Wang, Yong Wang, Chenghai Yin, Meng Fu, Wei Fu
{"title":"基于名为 YOLOMS 的多任务 CNN 模型识别芒果并确定茎干上的采摘点位置","authors":"Bin Zhang, Yuyang Xia, Rongrong Wang, Yong Wang, Chenghai Yin, Meng Fu, Wei Fu","doi":"10.1007/s11119-024-10119-y","DOIUrl":null,"url":null,"abstract":"<p>Due to the fact that the color of mango peel is similar to that of leaf, and there are many fruits on one stem, it is difficult to locate the picking point when using robots to pick fresh mango in the natural environment. A multi-task learning method named YOLOMS was proposed for mango recognition and rapid location of main stem picking points. Firstly, the backbone network of YOLOv5s was optimized and improved by using the RepVGG structure. The loss function of original YOLOv5s was improved by introducing the loss function of Focal-EIoU. The improved model could accurately identify mango and fruit stem in complex environment without decreasing reasoning speed. Secondly, the subtask of mango stem segmentation was added to the improved YOLOv5s model, and the YOLOMS multi-task model was constructed to obtain the location and semantic information of the fruit stem. Finally, the strategies of main fruit stem recognition and picking point location were put forward to realize the picking point location of the whole cluster mango. The images of mangoes on trees in natural environment were collected to test the performance of the YOLOMS model. The test results showed that the mAP and Recall of mango fruit and stem target detection by YOLOMS model were 82.42% and 85.64%, respectively, and the MIoU of stem semantic segmentation reached to 82.26%. The recognition accuracy of mangoes was 92.19%, the success rate of stem picking location was 89.84%, and the average location time was 58.4 ms. Compared with the target detection models of Yolov4, Yolov5s, Yolov7-tiny and the target segmentation models of U-net, PSPNet and DeepLab_v3+, the improved YOLOMS model had significantly better performance, which could quickly and accurately locate the picking point. This research provides technical support for mango picking robot to recognize the fruit and locate the picking point.</p>","PeriodicalId":20423,"journal":{"name":"Precision Agriculture","volume":"305 1 1","pages":""},"PeriodicalIF":6.6000,"publicationDate":"2024-02-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Recognition of mango and location of picking point on stem based on a multi-task CNN model named YOLOMS\",\"authors\":\"Bin Zhang, Yuyang Xia, Rongrong Wang, Yong Wang, Chenghai Yin, Meng Fu, Wei Fu\",\"doi\":\"10.1007/s11119-024-10119-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Due to the fact that the color of mango peel is similar to that of leaf, and there are many fruits on one stem, it is difficult to locate the picking point when using robots to pick fresh mango in the natural environment. A multi-task learning method named YOLOMS was proposed for mango recognition and rapid location of main stem picking points. Firstly, the backbone network of YOLOv5s was optimized and improved by using the RepVGG structure. The loss function of original YOLOv5s was improved by introducing the loss function of Focal-EIoU. The improved model could accurately identify mango and fruit stem in complex environment without decreasing reasoning speed. Secondly, the subtask of mango stem segmentation was added to the improved YOLOv5s model, and the YOLOMS multi-task model was constructed to obtain the location and semantic information of the fruit stem. Finally, the strategies of main fruit stem recognition and picking point location were put forward to realize the picking point location of the whole cluster mango. The images of mangoes on trees in natural environment were collected to test the performance of the YOLOMS model. The test results showed that the mAP and Recall of mango fruit and stem target detection by YOLOMS model were 82.42% and 85.64%, respectively, and the MIoU of stem semantic segmentation reached to 82.26%. The recognition accuracy of mangoes was 92.19%, the success rate of stem picking location was 89.84%, and the average location time was 58.4 ms. Compared with the target detection models of Yolov4, Yolov5s, Yolov7-tiny and the target segmentation models of U-net, PSPNet and DeepLab_v3+, the improved YOLOMS model had significantly better performance, which could quickly and accurately locate the picking point. This research provides technical support for mango picking robot to recognize the fruit and locate the picking point.</p>\",\"PeriodicalId\":20423,\"journal\":{\"name\":\"Precision Agriculture\",\"volume\":\"305 1 1\",\"pages\":\"\"},\"PeriodicalIF\":6.6000,\"publicationDate\":\"2024-02-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Precision Agriculture\",\"FirstCategoryId\":\"97\",\"ListUrlMain\":\"https://doi.org/10.1007/s11119-024-10119-y\",\"RegionNum\":2,\"RegionCategory\":\"农林科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AGRICULTURE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Precision Agriculture","FirstCategoryId":"97","ListUrlMain":"https://doi.org/10.1007/s11119-024-10119-y","RegionNum":2,"RegionCategory":"农林科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AGRICULTURE, MULTIDISCIPLINARY","Score":null,"Total":0}
Recognition of mango and location of picking point on stem based on a multi-task CNN model named YOLOMS
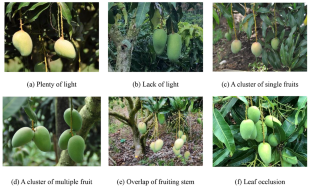
Due to the fact that the color of mango peel is similar to that of leaf, and there are many fruits on one stem, it is difficult to locate the picking point when using robots to pick fresh mango in the natural environment. A multi-task learning method named YOLOMS was proposed for mango recognition and rapid location of main stem picking points. Firstly, the backbone network of YOLOv5s was optimized and improved by using the RepVGG structure. The loss function of original YOLOv5s was improved by introducing the loss function of Focal-EIoU. The improved model could accurately identify mango and fruit stem in complex environment without decreasing reasoning speed. Secondly, the subtask of mango stem segmentation was added to the improved YOLOv5s model, and the YOLOMS multi-task model was constructed to obtain the location and semantic information of the fruit stem. Finally, the strategies of main fruit stem recognition and picking point location were put forward to realize the picking point location of the whole cluster mango. The images of mangoes on trees in natural environment were collected to test the performance of the YOLOMS model. The test results showed that the mAP and Recall of mango fruit and stem target detection by YOLOMS model were 82.42% and 85.64%, respectively, and the MIoU of stem semantic segmentation reached to 82.26%. The recognition accuracy of mangoes was 92.19%, the success rate of stem picking location was 89.84%, and the average location time was 58.4 ms. Compared with the target detection models of Yolov4, Yolov5s, Yolov7-tiny and the target segmentation models of U-net, PSPNet and DeepLab_v3+, the improved YOLOMS model had significantly better performance, which could quickly and accurately locate the picking point. This research provides technical support for mango picking robot to recognize the fruit and locate the picking point.
期刊介绍:
Precision Agriculture promotes the most innovative results coming from the research in the field of precision agriculture. It provides an effective forum for disseminating original and fundamental research and experience in the rapidly advancing area of precision farming.
There are many topics in the field of precision agriculture; therefore, the topics that are addressed include, but are not limited to:
Natural Resources Variability: Soil and landscape variability, digital elevation models, soil mapping, geostatistics, geographic information systems, microclimate, weather forecasting, remote sensing, management units, scale, etc.
Managing Variability: Sampling techniques, site-specific nutrient and crop protection chemical recommendation, crop quality, tillage, seed density, seed variety, yield mapping, remote sensing, record keeping systems, data interpretation and use, crops (corn, wheat, sugar beets, potatoes, peanut, cotton, vegetables, etc.), management scale, etc.
Engineering Technology: Computers, positioning systems, DGPS, machinery, tillage, planting, nutrient and crop protection implements, manure, irrigation, fertigation, yield monitor and mapping, soil physical and chemical characteristic sensors, weed/pest mapping, etc.
Profitability: MEY, net returns, BMPs, optimum recommendations, crop quality, technology cost, sustainability, social impacts, marketing, cooperatives, farm scale, crop type, etc.
Environment: Nutrient, crop protection chemicals, sediments, leaching, runoff, practices, field, watershed, on/off farm, artificial drainage, ground water, surface water, etc.
Technology Transfer: Skill needs, education, training, outreach, methods, surveys, agri-business, producers, distance education, Internet, simulations models, decision support systems, expert systems, on-farm experimentation, partnerships, quality of rural life, etc.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


