{"title":"基于 UDP 的无线网络上的可变步长估计,应用于氢动力无人机","authors":"Shi Liang, Chenxiao Cai, Min Xia, Hong Lin","doi":"10.1049/cth2.12621","DOIUrl":null,"url":null,"abstract":"<p>In this paper, the problem of state estimation for systems over wireless networks using user datagram protocol is focused on. It is known that for such a system, the probability density function of the system state follows a Gaussian mixture model (GMM), and the number of components in this model grows exponentially over time, which makes the computation of optimal estimates infeasible. To compute optimal estimates, based on Kullback-Leibler divergence, a strategy with variable step-sizes to truncate and fuse the GMM is proposed. Based on the obtained GMM, a variable step-size estimator is designed to compute optimal estimates during an estimation cycle. The advantages of the proposed estimator are twofold: (1) its estimation performance is superior to that of existing one-step fast estimators; (2) its estimation efficiency is much higher than that of the optimal estimator. Finally, trajectory tracking has been proposed for a real-world hydrogen-powered unmanned aerial vehicle to show the effectiveness of our methods.</p>","PeriodicalId":50382,"journal":{"name":"IET Control Theory and Applications","volume":"18 7","pages":"865-876"},"PeriodicalIF":2.2000,"publicationDate":"2024-01-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cth2.12621","citationCount":"0","resultStr":"{\"title\":\"Variable step-size estimation over UDP-based wireless networks with application to a hydrogen-powered UAV\",\"authors\":\"Shi Liang, Chenxiao Cai, Min Xia, Hong Lin\",\"doi\":\"10.1049/cth2.12621\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In this paper, the problem of state estimation for systems over wireless networks using user datagram protocol is focused on. It is known that for such a system, the probability density function of the system state follows a Gaussian mixture model (GMM), and the number of components in this model grows exponentially over time, which makes the computation of optimal estimates infeasible. To compute optimal estimates, based on Kullback-Leibler divergence, a strategy with variable step-sizes to truncate and fuse the GMM is proposed. Based on the obtained GMM, a variable step-size estimator is designed to compute optimal estimates during an estimation cycle. The advantages of the proposed estimator are twofold: (1) its estimation performance is superior to that of existing one-step fast estimators; (2) its estimation efficiency is much higher than that of the optimal estimator. Finally, trajectory tracking has been proposed for a real-world hydrogen-powered unmanned aerial vehicle to show the effectiveness of our methods.</p>\",\"PeriodicalId\":50382,\"journal\":{\"name\":\"IET Control Theory and Applications\",\"volume\":\"18 7\",\"pages\":\"865-876\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2024-01-15\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cth2.12621\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Control Theory and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/cth2.12621\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Control Theory and Applications","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/cth2.12621","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Variable step-size estimation over UDP-based wireless networks with application to a hydrogen-powered UAV
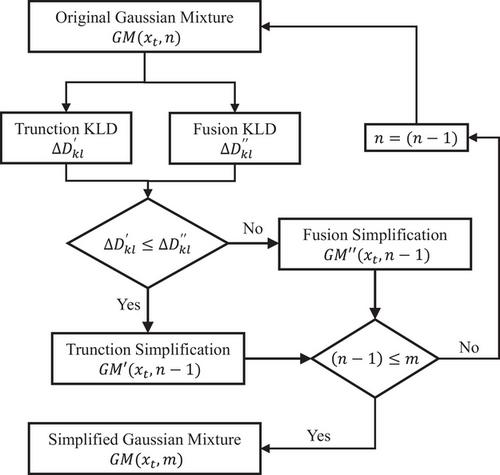
In this paper, the problem of state estimation for systems over wireless networks using user datagram protocol is focused on. It is known that for such a system, the probability density function of the system state follows a Gaussian mixture model (GMM), and the number of components in this model grows exponentially over time, which makes the computation of optimal estimates infeasible. To compute optimal estimates, based on Kullback-Leibler divergence, a strategy with variable step-sizes to truncate and fuse the GMM is proposed. Based on the obtained GMM, a variable step-size estimator is designed to compute optimal estimates during an estimation cycle. The advantages of the proposed estimator are twofold: (1) its estimation performance is superior to that of existing one-step fast estimators; (2) its estimation efficiency is much higher than that of the optimal estimator. Finally, trajectory tracking has been proposed for a real-world hydrogen-powered unmanned aerial vehicle to show the effectiveness of our methods.
期刊介绍:
IET Control Theory & Applications is devoted to control systems in the broadest sense, covering new theoretical results and the applications of new and established control methods. Among the topics of interest are system modelling, identification and simulation, the analysis and design of control systems (including computer-aided design), and practical implementation. The scope encompasses technological, economic, physiological (biomedical) and other systems, including man-machine interfaces.
Most of the papers published deal with original work from industrial and government laboratories and universities, but subject reviews and tutorial expositions of current methods are welcomed. Correspondence discussing published papers is also welcomed.
Applications papers need not necessarily involve new theory. Papers which describe new realisations of established methods, or control techniques applied in a novel situation, or practical studies which compare various designs, would be of interest. Of particular value are theoretical papers which discuss the applicability of new work or applications which engender new theoretical applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


