{"title":"基于因子图优化的无人飞行器光探测与测距 同步定位与测绘算法,用于隧道三维测绘","authors":"Jian Xie, Zhuoping Wu, Bing Wang, Aoshu Xu, Yunfei Chen, Jing Li","doi":"10.1049/rsn2.12541","DOIUrl":null,"url":null,"abstract":"<p>The current mature Simultaneous Localisation And Mapping (SLAM) algorithms, when applied to tunnel scenarios with point cloud degradation and poor lighting conditions, often lead to a sharp increase in the estimated attitude error of the unmanned aerial vehicle (UAV), or even prevent the UAV from moving autonomously due to severe feature degradation. To address the above problems, the authors propose a SLAM algorithm based on factor graph optimisation, Iterative Closest Point and Normal Distributions Transform algorithms. A front-end point cloud registration module and a back-end construction algorithm based on filtering and graph optimisation are designed. To verify the effectiveness of the proposed algorithm, experiments are conducted on KITTI dataset and real tunnel scenes, and compared with LiDAR Odometry and Mapping (LOAM) and lightweight and ground optimised (LeGO)-LOAM algorithms. The results show that the average processing time of the proposed method is about 75 ms, which can meet the real-time requirements of autonomous aerial vehicles. Compared with LOAM and LeGO-LOAM in the real tunnel experiment, the proposed method shows the tunnel 3D map construction.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 6","pages":"939-952"},"PeriodicalIF":1.4000,"publicationDate":"2024-01-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12541","citationCount":"0","resultStr":"{\"title\":\"An unmanned aerial vehicle light detection and ranging Simultaneous Localisation And Mapping algorithm based on factor graph optimisation for tunnel 3D mapping\",\"authors\":\"Jian Xie, Zhuoping Wu, Bing Wang, Aoshu Xu, Yunfei Chen, Jing Li\",\"doi\":\"10.1049/rsn2.12541\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The current mature Simultaneous Localisation And Mapping (SLAM) algorithms, when applied to tunnel scenarios with point cloud degradation and poor lighting conditions, often lead to a sharp increase in the estimated attitude error of the unmanned aerial vehicle (UAV), or even prevent the UAV from moving autonomously due to severe feature degradation. To address the above problems, the authors propose a SLAM algorithm based on factor graph optimisation, Iterative Closest Point and Normal Distributions Transform algorithms. A front-end point cloud registration module and a back-end construction algorithm based on filtering and graph optimisation are designed. To verify the effectiveness of the proposed algorithm, experiments are conducted on KITTI dataset and real tunnel scenes, and compared with LiDAR Odometry and Mapping (LOAM) and lightweight and ground optimised (LeGO)-LOAM algorithms. The results show that the average processing time of the proposed method is about 75 ms, which can meet the real-time requirements of autonomous aerial vehicles. Compared with LOAM and LeGO-LOAM in the real tunnel experiment, the proposed method shows the tunnel 3D map construction.</p>\",\"PeriodicalId\":50377,\"journal\":{\"name\":\"Iet Radar Sonar and Navigation\",\"volume\":\"18 6\",\"pages\":\"939-952\"},\"PeriodicalIF\":1.4000,\"publicationDate\":\"2024-01-26\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12541\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iet Radar Sonar and Navigation\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12541\",\"RegionNum\":4,\"RegionCategory\":\"管理学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12541","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
摘要
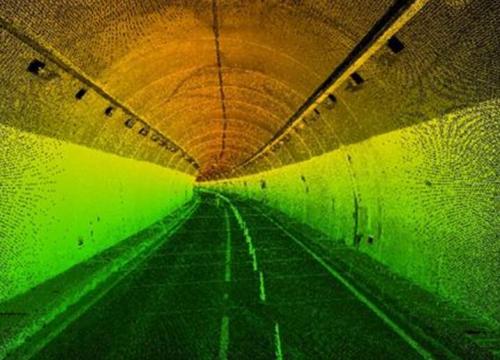
目前成熟的同时定位与绘图(SLAM)算法在应用于点云退化和光照条件差的隧道场景时,往往会导致无人飞行器(UAV)的估计姿态误差急剧增加,甚至由于严重的特征退化而导致无人飞行器无法自主移动。针对上述问题,作者提出了一种基于因子图优化、迭代最邻近点和正态分布变换算法的 SLAM 算法。他们设计了一个前端点云注册模块和一个基于滤波和图优化的后端构建算法。为了验证所提算法的有效性,在 KITTI 数据集和真实隧道场景上进行了实验,并与激光雷达测距与绘图(LOAM)算法和轻量级地面优化(LeGO)-LOAM 算法进行了比较。结果表明,拟议方法的平均处理时间约为 75 毫秒,可以满足自动飞行器的实时要求。在实际隧道实验中,与LOAM和LeGO-LOAM相比,提出的方法显示了隧道三维地图的构建。
An unmanned aerial vehicle light detection and ranging Simultaneous Localisation And Mapping algorithm based on factor graph optimisation for tunnel 3D mapping
The current mature Simultaneous Localisation And Mapping (SLAM) algorithms, when applied to tunnel scenarios with point cloud degradation and poor lighting conditions, often lead to a sharp increase in the estimated attitude error of the unmanned aerial vehicle (UAV), or even prevent the UAV from moving autonomously due to severe feature degradation. To address the above problems, the authors propose a SLAM algorithm based on factor graph optimisation, Iterative Closest Point and Normal Distributions Transform algorithms. A front-end point cloud registration module and a back-end construction algorithm based on filtering and graph optimisation are designed. To verify the effectiveness of the proposed algorithm, experiments are conducted on KITTI dataset and real tunnel scenes, and compared with LiDAR Odometry and Mapping (LOAM) and lightweight and ground optimised (LeGO)-LOAM algorithms. The results show that the average processing time of the proposed method is about 75 ms, which can meet the real-time requirements of autonomous aerial vehicles. Compared with LOAM and LeGO-LOAM in the real tunnel experiment, the proposed method shows the tunnel 3D map construction.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


