Le Zong, Zonghui Sun, Jieliang Zhao, Zhengzhong Huang, Xiaokun Liu, Lei Jiang, Congqiao Li, Jacob Mulwa Muinde, Jianing Wu, Xiaolong Wang, Hongbin Liang, Haoyu Liu, Yuxia Yang, Siqin Ge
{"title":"蛙足甲虫 Sagra femorata 的自锁机制。","authors":"Le Zong, Zonghui Sun, Jieliang Zhao, Zhengzhong Huang, Xiaokun Liu, Lei Jiang, Congqiao Li, Jacob Mulwa Muinde, Jianing Wu, Xiaolong Wang, Hongbin Liang, Haoyu Liu, Yuxia Yang, Siqin Ge","doi":"10.1111/1744-7917.13323","DOIUrl":null,"url":null,"abstract":"<p><p>Insect legs play a crucial role in various modes of locomotion, including walking, jumping, swimming, and other forms of movement. The flexibility of their leg joints is critical in enabling various modes of locomotion. The frog-legged leaf beetle Sagra femorata possesses remarkably enlarged hind legs, which are considered to be a critical adaptation that enables the species to withstand external pressures. When confronted with external threats, S. femorata initiates a stress response by rapidly rotating its hind legs backward and upward to a specific angle, thereby potentially intimidating potential assailants. Based on video analysis, we identified 4 distinct phases of the hind leg rotation process in S. femorata, which were determined by the range of rotation angles (0°-168.77°). Utilizing micro-computed tomography (micro-CT) technology, we performed a 3-dimensional (3D) reconstruction and conducted relative positioning and volumetric analysis of the metacoxa and metatrochanter of S. femorata. Our analysis revealed that the metacoxa-trochanter joint is a \"screw-nut\" structure connected by 4 muscles, which regulate the rotation of the legs. Further testing using a 3D-printed model of the metacoxa-trochanter joint demonstrated its possession of a self-locking mechanism capable of securing the legs in specific positions to prevent excessive rotation and dislocation. It can be envisioned that this self-locking mechanism holds potential for application in bio-inspired robotics.</p>","PeriodicalId":13618,"journal":{"name":"Insect Science","volume":" ","pages":"1864-1875"},"PeriodicalIF":2.9000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A self-locking mechanism of the frog-legged beetle Sagra femorata.\",\"authors\":\"Le Zong, Zonghui Sun, Jieliang Zhao, Zhengzhong Huang, Xiaokun Liu, Lei Jiang, Congqiao Li, Jacob Mulwa Muinde, Jianing Wu, Xiaolong Wang, Hongbin Liang, Haoyu Liu, Yuxia Yang, Siqin Ge\",\"doi\":\"10.1111/1744-7917.13323\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Insect legs play a crucial role in various modes of locomotion, including walking, jumping, swimming, and other forms of movement. The flexibility of their leg joints is critical in enabling various modes of locomotion. The frog-legged leaf beetle Sagra femorata possesses remarkably enlarged hind legs, which are considered to be a critical adaptation that enables the species to withstand external pressures. When confronted with external threats, S. femorata initiates a stress response by rapidly rotating its hind legs backward and upward to a specific angle, thereby potentially intimidating potential assailants. Based on video analysis, we identified 4 distinct phases of the hind leg rotation process in S. femorata, which were determined by the range of rotation angles (0°-168.77°). Utilizing micro-computed tomography (micro-CT) technology, we performed a 3-dimensional (3D) reconstruction and conducted relative positioning and volumetric analysis of the metacoxa and metatrochanter of S. femorata. Our analysis revealed that the metacoxa-trochanter joint is a \\\"screw-nut\\\" structure connected by 4 muscles, which regulate the rotation of the legs. Further testing using a 3D-printed model of the metacoxa-trochanter joint demonstrated its possession of a self-locking mechanism capable of securing the legs in specific positions to prevent excessive rotation and dislocation. It can be envisioned that this self-locking mechanism holds potential for application in bio-inspired robotics.</p>\",\"PeriodicalId\":13618,\"journal\":{\"name\":\"Insect Science\",\"volume\":\" \",\"pages\":\"1864-1875\"},\"PeriodicalIF\":2.9000,\"publicationDate\":\"2024-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Insect Science\",\"FirstCategoryId\":\"97\",\"ListUrlMain\":\"https://doi.org/10.1111/1744-7917.13323\",\"RegionNum\":1,\"RegionCategory\":\"农林科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/28 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENTOMOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Insect Science","FirstCategoryId":"97","ListUrlMain":"https://doi.org/10.1111/1744-7917.13323","RegionNum":1,"RegionCategory":"农林科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/28 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENTOMOLOGY","Score":null,"Total":0}
A self-locking mechanism of the frog-legged beetle Sagra femorata.
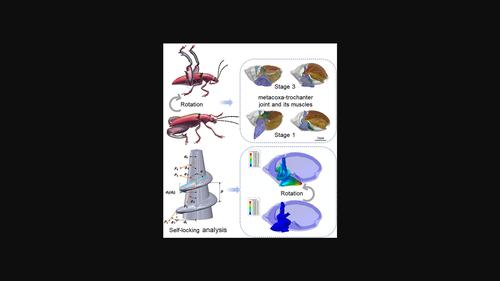
Insect legs play a crucial role in various modes of locomotion, including walking, jumping, swimming, and other forms of movement. The flexibility of their leg joints is critical in enabling various modes of locomotion. The frog-legged leaf beetle Sagra femorata possesses remarkably enlarged hind legs, which are considered to be a critical adaptation that enables the species to withstand external pressures. When confronted with external threats, S. femorata initiates a stress response by rapidly rotating its hind legs backward and upward to a specific angle, thereby potentially intimidating potential assailants. Based on video analysis, we identified 4 distinct phases of the hind leg rotation process in S. femorata, which were determined by the range of rotation angles (0°-168.77°). Utilizing micro-computed tomography (micro-CT) technology, we performed a 3-dimensional (3D) reconstruction and conducted relative positioning and volumetric analysis of the metacoxa and metatrochanter of S. femorata. Our analysis revealed that the metacoxa-trochanter joint is a "screw-nut" structure connected by 4 muscles, which regulate the rotation of the legs. Further testing using a 3D-printed model of the metacoxa-trochanter joint demonstrated its possession of a self-locking mechanism capable of securing the legs in specific positions to prevent excessive rotation and dislocation. It can be envisioned that this self-locking mechanism holds potential for application in bio-inspired robotics.
期刊介绍:
Insect Science is an English-language journal, which publishes original research articles dealing with all fields of research in into insects and other terrestrial arthropods. Papers in any of the following fields will be considered: ecology, behavior, biogeography, physiology, biochemistry, sociobiology, phylogeny, pest management, and exotic incursions. The emphasis of the journal is on the adaptation and evolutionary biology of insects from the molecular to the ecosystem level. Reviews, mini reviews and letters to the editor, book reviews, and information about academic activities of the society are also published.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


