利用固态和液态类似集体状态的自组织机器人集合体。
IF 27.5
1区 计算机科学
Q1 ROBOTICS
引用次数: 0
摘要
设计能够改变物理外形尺寸和顺应性以适应环境限制的机器人系统,仍然是一项重大的概念和技术挑战。为了解决这个问题,我们推出了 Granulobot 模块化系统,它模糊了软机器人、模块化机器人和蜂群机器人之间的区别。该系统由齿轮状单元组成,每个单元包含一个执行器,这样单元就能利用磁耦合自我组装成更大的颗粒状集合体。这些聚合体可以动态地重新配置,也可以分裂成子系统,然后再重新组合。聚合体可以自组织成具有固态和液态性质的集体状态,从而表现出截然不同的顺应性。这些状态可以通过致动器进行局部扰动,或通过环境的机械反馈进行外部扰动,从而以分散的方式产生自适应的形状变化。这反过来又能产生适应不同条件的运动策略。聚合体可以在不使用外部传感器或坐标的情况下越过障碍物,在不同的表面上保持稳定的步态,而不需要各单元之间进行电子通信。模块化设计突出了一种物理的、形态的控制形式,推动了具有变形能力的弹性机器人系统的发展,使其能够适应不同的功能和条件。本文章由计算机程序翻译,如有差异,请以英文原文为准。
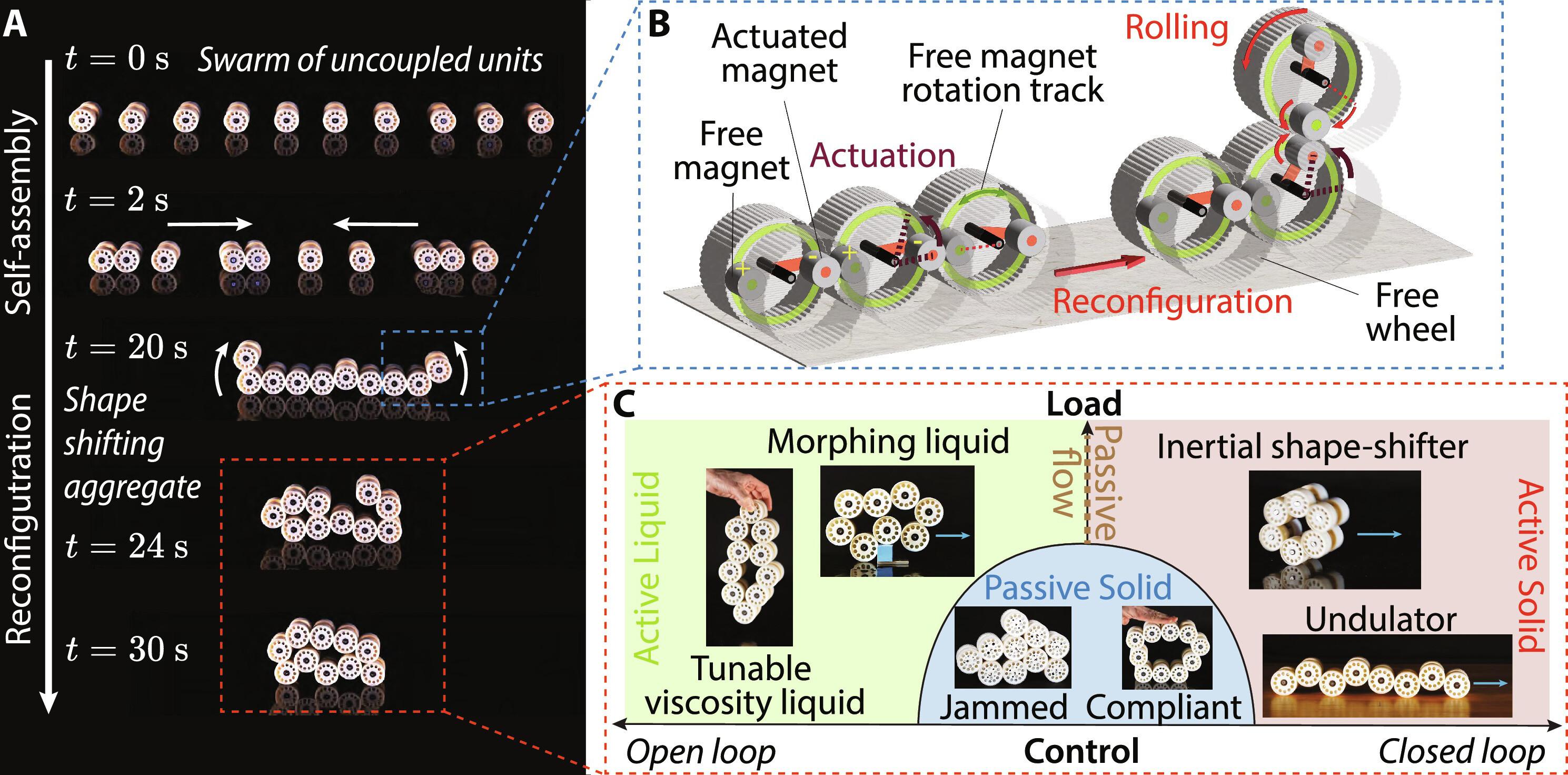
A self-organizing robotic aggregate using solid and liquid-like collective states
Designing robotic systems that can change their physical form factor as well as their compliance to adapt to environmental constraints remains a major conceptual and technical challenge. To address this, we introduce the Granulobot, a modular system that blurs the distinction between soft, modular, and swarm robotics. The system consists of gear-like units that each contain a single actuator such that units can self-assemble into larger, granular aggregates using magnetic coupling. These aggregates can reconfigure dynamically and also split into subsystems that might later recombine. Aggregates can self-organize into collective states with solid- and liquid-like properties, thus displaying widely differing compliance. These states can be perturbed locally via actuators or externally via mechanical feedback from the environment to produce adaptive shape-shifting in a decentralized manner. This, in turn, can generate locomotion strategies adapted to different conditions. Aggregates can move over obstacles without using external sensors or coordinates to maintain a steady gait over different surfaces without electronic communication among units. The modular design highlights a physical, morphological form of control that advances the development of resilient robotic systems with the ability to morph and adapt to different functions and conditions.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


