用于未知流场中三个协同领导的平面刚性形成的自适应神经设计
IF 2.2
4区 计算机科学
Q2 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
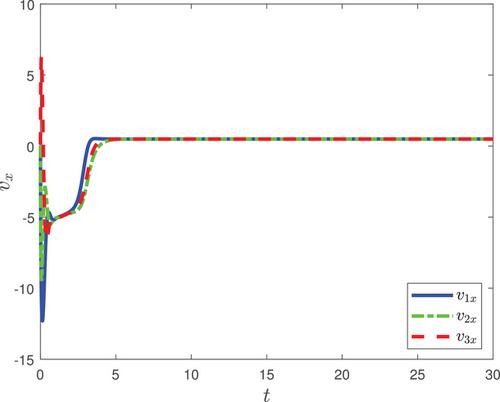
本文讨论的是三个二阶共导的鲁棒平面刚性编队控制问题,其速度和加速度分别作用于未知流场。为了使所得到的系统具有均匀有界性,本文引入了自适应投影来设计新的自适应神经控制律。为了避免神经网络的高斯函数导数,使用了动态曲面。仿真结果说明了所提控制法则的有效性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
An adaptive neural design for planar rigid formation of three coleaders in unknown flowfields
This article deals with the robust planar rigid formation control problem of three second-order coleaders with unknown flowfields acting on the velocity and acceleration respectively. To yield the uniform boundedness property of the resulting system, an adaptive projection is introduced to design the novel adaptive neural control law. To avoid the derivatives of Gaussian functions of neural networks, dynamic surface is used. Simulation results are provided to illustrate the effectiveness of the proposed control law.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

IET Control Theory and Applications
工程技术-工程:电子与电气
CiteScore
5.70
自引率
7.70%
发文量
167
审稿时长
5.1 months
期刊介绍:
IET Control Theory & Applications is devoted to control systems in the broadest sense, covering new theoretical results and the applications of new and established control methods. Among the topics of interest are system modelling, identification and simulation, the analysis and design of control systems (including computer-aided design), and practical implementation. The scope encompasses technological, economic, physiological (biomedical) and other systems, including man-machine interfaces.
Most of the papers published deal with original work from industrial and government laboratories and universities, but subject reviews and tutorial expositions of current methods are welcomed. Correspondence discussing published papers is also welcomed.
Applications papers need not necessarily involve new theory. Papers which describe new realisations of established methods, or control techniques applied in a novel situation, or practical studies which compare various designs, would be of interest. Of particular value are theoretical papers which discuss the applicability of new work or applications which engender new theoretical applications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


