Xiaofei Zhang, Haiping Du, Zhijuan Jia, Yuchu He, Yanyan Yang
{"title":"拒绝服务攻击下非线性自动驾驶车辆排控制的检测和重新路由机制","authors":"Xiaofei Zhang, Haiping Du, Zhijuan Jia, Yuchu He, Yanyan Yang","doi":"10.1049/cth2.12614","DOIUrl":null,"url":null,"abstract":"<p>This paper presents a novel detection and rerouting mechanism for distributed adaptive platoon control of non-linear autonomous connected vehicles under denial of service (DoS) attacks. DoS attacks can cause delays or losses of data packets due to blocked communication channels, leading to reducing platoon performance or even collisions among vehicles. To tackle this issue, the proposed mechanism detects and reroutes communication topology depending on the real-time topology and the number of link failures. Real-time detection divides the scenario of DoS attacks into three parts. According to the different scenarios, rerouting mechanisms will be utilized. A controller adapted to real-time variable communication topology is also designed in this scheme. The adjacency matrix of the real-time communication topology generated by the rerouting mechanism is used to update the controller so that the platoon can remain in a stable state without being affected by DoS attacks. In addition, the sliding mode controller and the observer are designed by solving linear matrix inequalities, and the platoon stability and internal stability are proven. Numerical simulation studies demonstrate that the proposed mechanism and control design can reduce the vehicle state estimate error and platoon-tracking error to ideal states under DoS attacks. The proposed method solves the problem that the existing methods have not considered the number of link failures and the inability to restore communication when the communication topology is paralyzed.</p>","PeriodicalId":50382,"journal":{"name":"IET Control Theory and Applications","volume":"18 6","pages":"798-813"},"PeriodicalIF":2.2000,"publicationDate":"2024-01-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cth2.12614","citationCount":"0","resultStr":"{\"title\":\"A detection and rerouting mechanism for platoon control of non-linear autonomous vehicles under denial of service attacks\",\"authors\":\"Xiaofei Zhang, Haiping Du, Zhijuan Jia, Yuchu He, Yanyan Yang\",\"doi\":\"10.1049/cth2.12614\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper presents a novel detection and rerouting mechanism for distributed adaptive platoon control of non-linear autonomous connected vehicles under denial of service (DoS) attacks. DoS attacks can cause delays or losses of data packets due to blocked communication channels, leading to reducing platoon performance or even collisions among vehicles. To tackle this issue, the proposed mechanism detects and reroutes communication topology depending on the real-time topology and the number of link failures. Real-time detection divides the scenario of DoS attacks into three parts. According to the different scenarios, rerouting mechanisms will be utilized. A controller adapted to real-time variable communication topology is also designed in this scheme. The adjacency matrix of the real-time communication topology generated by the rerouting mechanism is used to update the controller so that the platoon can remain in a stable state without being affected by DoS attacks. In addition, the sliding mode controller and the observer are designed by solving linear matrix inequalities, and the platoon stability and internal stability are proven. Numerical simulation studies demonstrate that the proposed mechanism and control design can reduce the vehicle state estimate error and platoon-tracking error to ideal states under DoS attacks. The proposed method solves the problem that the existing methods have not considered the number of link failures and the inability to restore communication when the communication topology is paralyzed.</p>\",\"PeriodicalId\":50382,\"journal\":{\"name\":\"IET Control Theory and Applications\",\"volume\":\"18 6\",\"pages\":\"798-813\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2024-01-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cth2.12614\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Control Theory and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/cth2.12614\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Control Theory and Applications","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/cth2.12614","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
摘要
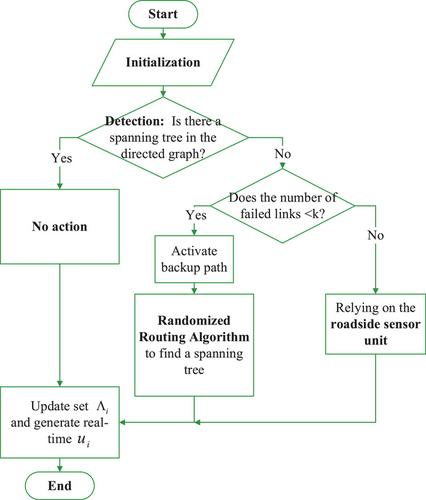
本文提出了一种新颖的检测和重路由机制,用于在拒绝服务(DoS)攻击下对非线性自主互联车辆进行分布式自适应排队控制。DoS 攻击会因通信信道受阻而导致数据包延迟或丢失,从而降低车队性能,甚至导致车辆间的碰撞。为解决这一问题,所提出的机制可根据实时拓扑和链路故障数量检测并重新规划通信拓扑。实时检测将 DoS 攻击场景分为三个部分。根据不同的场景,将采用不同的重路由机制。本方案还设计了一个适应实时可变通信拓扑的控制器。利用重路由机制生成的实时通信拓扑邻接矩阵更新控制器,从而使排保持稳定状态,不受 DoS 攻击的影响。此外,还通过求解线性矩阵不等式设计了滑模控制器和观测器,并证明了排稳定性和内部稳定性。数值仿真研究表明,所提出的机制和控制设计能将 DoS 攻击下的车辆状态估计误差和排跟踪误差降低到理想状态。提出的方法解决了现有方法没有考虑链路故障次数以及通信拓扑瘫痪时无法恢复通信的问题。
A detection and rerouting mechanism for platoon control of non-linear autonomous vehicles under denial of service attacks
This paper presents a novel detection and rerouting mechanism for distributed adaptive platoon control of non-linear autonomous connected vehicles under denial of service (DoS) attacks. DoS attacks can cause delays or losses of data packets due to blocked communication channels, leading to reducing platoon performance or even collisions among vehicles. To tackle this issue, the proposed mechanism detects and reroutes communication topology depending on the real-time topology and the number of link failures. Real-time detection divides the scenario of DoS attacks into three parts. According to the different scenarios, rerouting mechanisms will be utilized. A controller adapted to real-time variable communication topology is also designed in this scheme. The adjacency matrix of the real-time communication topology generated by the rerouting mechanism is used to update the controller so that the platoon can remain in a stable state without being affected by DoS attacks. In addition, the sliding mode controller and the observer are designed by solving linear matrix inequalities, and the platoon stability and internal stability are proven. Numerical simulation studies demonstrate that the proposed mechanism and control design can reduce the vehicle state estimate error and platoon-tracking error to ideal states under DoS attacks. The proposed method solves the problem that the existing methods have not considered the number of link failures and the inability to restore communication when the communication topology is paralyzed.
期刊介绍:
IET Control Theory & Applications is devoted to control systems in the broadest sense, covering new theoretical results and the applications of new and established control methods. Among the topics of interest are system modelling, identification and simulation, the analysis and design of control systems (including computer-aided design), and practical implementation. The scope encompasses technological, economic, physiological (biomedical) and other systems, including man-machine interfaces.
Most of the papers published deal with original work from industrial and government laboratories and universities, but subject reviews and tutorial expositions of current methods are welcomed. Correspondence discussing published papers is also welcomed.
Applications papers need not necessarily involve new theory. Papers which describe new realisations of established methods, or control techniques applied in a novel situation, or practical studies which compare various designs, would be of interest. Of particular value are theoretical papers which discuss the applicability of new work or applications which engender new theoretical applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


