用于复杂表面高精度加工的机器人系统的位置和力控制
IF 0.4
Q4 ENGINEERING, MECHANICAL
Journal of Machinery Manufacture and Reliability
Pub Date : 2023-12-28
DOI:10.1134/s1052618823080022
引用次数: 0
摘要
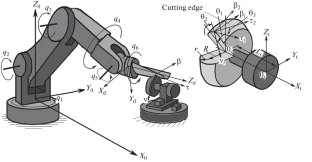
摘要 考虑了对机器人系统进行位置和力控制,以执行加工复杂表面的高精度操作。文中给出了位置和力控制系统的框图,并对纵向位移速度及其与横向位移的关系以及刀具刃口与加工表面之间的压力进行了计算。介绍了产生力作用的系统结构以及该系统在 Matlab-Simulink 系统中的建模。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Position and Force Control of a Robotic System for High Precision Machining of Complex Surfaces
Abstract
The position and force control of a robotic system to perform high-precision operations for machining complex surfaces are considered. A block diagram of the position and force control system is presented, and computations and calculations of the velocity of the longitudinal displacement and its relationship with the transverse displacement and pressure force between the cutting edge of the tool and the machining surface are provided. The structure of the system generating force action and the modeling of this system in the Matlab–Simulink system are described.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Journal of Machinery Manufacture and Reliability
ENGINEERING, MECHANICAL-
CiteScore
0.80
自引率
33.30%
发文量
61
期刊介绍:
Journal of Machinery Manufacture and Reliability is devoted to advances in machine design; CAD/CAM; experimental mechanics of machines, machine life expectancy, and reliability studies; machine dynamics and kinematics; vibration, acoustics, and stress/strain; wear resistance engineering; real-time machine operation diagnostics; robotic systems; new materials and manufacturing processes, and other topics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


