Do-Hyun Chun , Myung-Il Roh , Hye-Won Lee , Donghun Yu
{"title":"基于深度强化学习的自动驾驶船舶路径速度控制防撞方法","authors":"Do-Hyun Chun , Myung-Il Roh , Hye-Won Lee , Donghun Yu","doi":"10.1016/j.ijnaoe.2023.100579","DOIUrl":null,"url":null,"abstract":"<div><p>In this paper, we propose a collision avoidance method based on deep reinforcement learning (DRL) that simultaneously controls the path and speed of a ship. The DRL is actively applied in machine control and artificial intelligence. To verify the proposed method, we applied it to the Imazu problem. It provides benchmark scenarios for collision avoidance. In particular, we compared and analyzed the collision avoidance performance according to the level of learning and various parameters to ensure that the proposed method displays optimal avoidance performance. The results indicated that the proposed method can determine a safe avoidance path for a given situation. Finally, to compare the performance of the proposed method, we compared the collision avoidance method based on the path–speed control of the OS proposed in this study with the collision avoidance method that controls only the path of the OS (Chun et al., 2021). We observed that the proposed method failed in 6 out of 20 scenarios of the Imazu problem when only the path of the OS was controlled. However, it succeeded in collision avoidance in all the 20 scenarios when both path and speed were controlled simultaneously.</p></div>","PeriodicalId":14160,"journal":{"name":"International Journal of Naval Architecture and Ocean Engineering","volume":"16 ","pages":"Article 100579"},"PeriodicalIF":2.3000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2092678223000687/pdfft?md5=182881b1beb17794f045c7f1454d1672&pid=1-s2.0-S2092678223000687-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Method for collision avoidance based on deep reinforcement learning with path-speed control for an autonomous ship\",\"authors\":\"Do-Hyun Chun , Myung-Il Roh , Hye-Won Lee , Donghun Yu\",\"doi\":\"10.1016/j.ijnaoe.2023.100579\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In this paper, we propose a collision avoidance method based on deep reinforcement learning (DRL) that simultaneously controls the path and speed of a ship. The DRL is actively applied in machine control and artificial intelligence. To verify the proposed method, we applied it to the Imazu problem. It provides benchmark scenarios for collision avoidance. In particular, we compared and analyzed the collision avoidance performance according to the level of learning and various parameters to ensure that the proposed method displays optimal avoidance performance. The results indicated that the proposed method can determine a safe avoidance path for a given situation. Finally, to compare the performance of the proposed method, we compared the collision avoidance method based on the path–speed control of the OS proposed in this study with the collision avoidance method that controls only the path of the OS (Chun et al., 2021). We observed that the proposed method failed in 6 out of 20 scenarios of the Imazu problem when only the path of the OS was controlled. However, it succeeded in collision avoidance in all the 20 scenarios when both path and speed were controlled simultaneously.</p></div>\",\"PeriodicalId\":14160,\"journal\":{\"name\":\"International Journal of Naval Architecture and Ocean Engineering\",\"volume\":\"16 \",\"pages\":\"Article 100579\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2092678223000687/pdfft?md5=182881b1beb17794f045c7f1454d1672&pid=1-s2.0-S2092678223000687-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Naval Architecture and Ocean Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2092678223000687\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, MARINE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Naval Architecture and Ocean Engineering","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2092678223000687","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, MARINE","Score":null,"Total":0}
Method for collision avoidance based on deep reinforcement learning with path-speed control for an autonomous ship
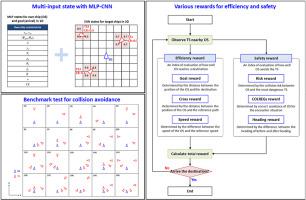
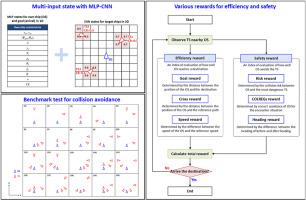
In this paper, we propose a collision avoidance method based on deep reinforcement learning (DRL) that simultaneously controls the path and speed of a ship. The DRL is actively applied in machine control and artificial intelligence. To verify the proposed method, we applied it to the Imazu problem. It provides benchmark scenarios for collision avoidance. In particular, we compared and analyzed the collision avoidance performance according to the level of learning and various parameters to ensure that the proposed method displays optimal avoidance performance. The results indicated that the proposed method can determine a safe avoidance path for a given situation. Finally, to compare the performance of the proposed method, we compared the collision avoidance method based on the path–speed control of the OS proposed in this study with the collision avoidance method that controls only the path of the OS (Chun et al., 2021). We observed that the proposed method failed in 6 out of 20 scenarios of the Imazu problem when only the path of the OS was controlled. However, it succeeded in collision avoidance in all the 20 scenarios when both path and speed were controlled simultaneously.
期刊介绍:
International Journal of Naval Architecture and Ocean Engineering provides a forum for engineers and scientists from a wide range of disciplines to present and discuss various phenomena in the utilization and preservation of ocean environment. Without being limited by the traditional categorization, it is encouraged to present advanced technology development and scientific research, as long as they are aimed for more and better human engagement with ocean environment. Topics include, but not limited to: marine hydrodynamics; structural mechanics; marine propulsion system; design methodology & practice; production technology; system dynamics & control; marine equipment technology; materials science; underwater acoustics; ocean remote sensing; and information technology related to ship and marine systems; ocean energy systems; marine environmental engineering; maritime safety engineering; polar & arctic engineering; coastal & port engineering; subsea engineering; and specialized watercraft engineering.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


