具有远程旋转中心的平行机械手的结构、运动学和原型设计
IF 0.4
Q4 ENGINEERING, MECHANICAL
Journal of Machinery Manufacture and Reliability
Pub Date : 2023-12-18
DOI:10.1134/s1052618823060080
引用次数: 0
摘要
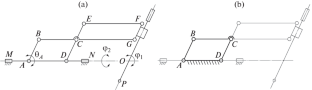
摘要 本文讨论了一种具有远程旋转中心的机构,旨在用于医学,特别是微创手术。基本机构由两个具有共同链接的平行四边形组成,使手术器械能够复制机构驱动链接的运动。为了确保机构具有更高的刚度,建议通过使用额外的带有一对驱动的 RRR 二联体来引入驱动冗余。由此产生的机构的位置问题已经解决。此外,还展示了该机构的三维模型和原型。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Structure, Kinematics, and Prototyping of a Parallel Manipulator with a Remote Center of Rotation
Abstract
A mechanism with a remote center of rotation, intended for use in medicine, and in particular, minimally invasive operations, is discussed. The basic mechanism consists of two parallelograms with common links, which allows the surgical instrument to duplicate the movement of the drive link of the mechanism. To ensure greater rigidity of the mechanism, it is proposed to introduce drive redundancy through the use of an additional RRR dyad with a drive pair. The position problem has been solved for the resulting mechanism. A 3D model and a prototype of the mechanism have been also presented.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Journal of Machinery Manufacture and Reliability
ENGINEERING, MECHANICAL-
CiteScore
0.80
自引率
33.30%
发文量
61
期刊介绍:
Journal of Machinery Manufacture and Reliability is devoted to advances in machine design; CAD/CAM; experimental mechanics of machines, machine life expectancy, and reliability studies; machine dynamics and kinematics; vibration, acoustics, and stress/strain; wear resistance engineering; real-time machine operation diagnostics; robotic systems; new materials and manufacturing processes, and other topics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


