{"title":"用于复杂肝胆胰手术的机器人单部位加单孔平台的早期经验","authors":"Jae Uk Chong, Ju Yeon Lee, Jin Hong Lim","doi":"10.1002/rcs.2602","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>Minimal invasive surgery in hepatobiliary and pancreatic (HBP) surgery has been accepted worldwide in recent years. However, applications of single-site laparoscopic surgery in complex HBP surgery have been limited due to difficulty in manoeuvring instruments and the limited range of motion resulting from clashing instruments.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>To overcome the limitations, we have used the Da Vinci single-site surgical platform with one additional port in a Da Vinci Xi system to perform donor right hepatectomy, pancreaticoduodenectomy, and combined resection of the common bile duct and spleen vessels preserving distal pancreatectomy.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>In selected patients, using a robotic single-site plus one port system allowed the successful completion of complex HBP surgery.</p>\n </section>\n \n <section>\n \n <h3> Discussion</h3>\n \n <p>Complex HBP surgery can be performed safely in a stable environment using the robotic single-site plus one port system. Further exploration of a robotic single-site plus one port in complex HBP surgery is necessary.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 1","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2023-12-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2602","citationCount":"0","resultStr":"{\"title\":\"Early experiences in robotic single-site plus one port platform for complex hepatobiliary and pancreatic surgery\",\"authors\":\"Jae Uk Chong, Ju Yeon Lee, Jin Hong Lim\",\"doi\":\"10.1002/rcs.2602\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n \\n <section>\\n \\n <h3> Background</h3>\\n \\n <p>Minimal invasive surgery in hepatobiliary and pancreatic (HBP) surgery has been accepted worldwide in recent years. However, applications of single-site laparoscopic surgery in complex HBP surgery have been limited due to difficulty in manoeuvring instruments and the limited range of motion resulting from clashing instruments.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Methods</h3>\\n \\n <p>To overcome the limitations, we have used the Da Vinci single-site surgical platform with one additional port in a Da Vinci Xi system to perform donor right hepatectomy, pancreaticoduodenectomy, and combined resection of the common bile duct and spleen vessels preserving distal pancreatectomy.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Results</h3>\\n \\n <p>In selected patients, using a robotic single-site plus one port system allowed the successful completion of complex HBP surgery.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Discussion</h3>\\n \\n <p>Complex HBP surgery can be performed safely in a stable environment using the robotic single-site plus one port system. Further exploration of a robotic single-site plus one port in complex HBP surgery is necessary.</p>\\n </section>\\n </div>\",\"PeriodicalId\":50311,\"journal\":{\"name\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"volume\":\"20 1\",\"pages\":\"\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-12-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2602\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2602\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2602","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
Early experiences in robotic single-site plus one port platform for complex hepatobiliary and pancreatic surgery
Background
Minimal invasive surgery in hepatobiliary and pancreatic (HBP) surgery has been accepted worldwide in recent years. However, applications of single-site laparoscopic surgery in complex HBP surgery have been limited due to difficulty in manoeuvring instruments and the limited range of motion resulting from clashing instruments.
Methods
To overcome the limitations, we have used the Da Vinci single-site surgical platform with one additional port in a Da Vinci Xi system to perform donor right hepatectomy, pancreaticoduodenectomy, and combined resection of the common bile duct and spleen vessels preserving distal pancreatectomy.
Results
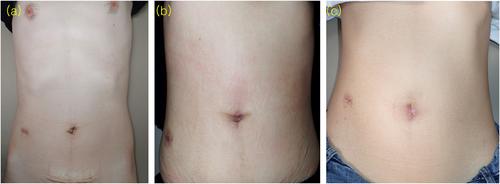
In selected patients, using a robotic single-site plus one port system allowed the successful completion of complex HBP surgery.
Discussion
Complex HBP surgery can be performed safely in a stable environment using the robotic single-site plus one port system. Further exploration of a robotic single-site plus one port in complex HBP surgery is necessary.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


