Denys Fontaine, Fabien Almairac, Bruno Chiapello, Aurélie Leplus
{"title":"使用无创无框架 Neurolocate 注册系统的 Neuromate 机器人引导深部脑刺激程序的应用准确性","authors":"Denys Fontaine, Fabien Almairac, Bruno Chiapello, Aurélie Leplus","doi":"10.1002/rcs.2610","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Objective</h3>\n \n <p>to measure the in vivo application accuracy of Neuromate robot-assisted deep brain stimulation procedures (DBS) using the new, non-invasive, frameless Neurolocate registration method.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>Neurolocate accuracy was measured in 17 patients undergoing DBS (32 leads). The registration was obtained by automatic recognition of the spatial location of the Neurolocate fiducials, fixed on the robot arm, on 3D intraoperative computerized tomography (CT) images relative to the patient's skull contours. Application accuracy was measured as the Euclidian distance between the points theoretically targeted on preoperative magnetic resonance imagingand the tip of the guiding tube visible on intraoperative CT images after merging images.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>Mean robot inaccuracy was 0.72 mm (SD 0.40; range 0.2–1.7 mm). Inaccuracies ≥1.5 mm were observed in 2/32 cases.</p>\n </section>\n \n <section>\n \n <h3> Conclusion</h3>\n \n <p>Our study confirms in vivo that the accuracy of the Neurolocate registration is compatible with the accuracy required for DBS procedures.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 1","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2023-12-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2610","citationCount":"0","resultStr":"{\"title\":\"Application accuracy of Neuromate robot-guided deep brain stimulation procedures using the non-invasive frameless Neurolocate registration system\",\"authors\":\"Denys Fontaine, Fabien Almairac, Bruno Chiapello, Aurélie Leplus\",\"doi\":\"10.1002/rcs.2610\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n \\n <section>\\n \\n <h3> Objective</h3>\\n \\n <p>to measure the in vivo application accuracy of Neuromate robot-assisted deep brain stimulation procedures (DBS) using the new, non-invasive, frameless Neurolocate registration method.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Methods</h3>\\n \\n <p>Neurolocate accuracy was measured in 17 patients undergoing DBS (32 leads). The registration was obtained by automatic recognition of the spatial location of the Neurolocate fiducials, fixed on the robot arm, on 3D intraoperative computerized tomography (CT) images relative to the patient's skull contours. Application accuracy was measured as the Euclidian distance between the points theoretically targeted on preoperative magnetic resonance imagingand the tip of the guiding tube visible on intraoperative CT images after merging images.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Results</h3>\\n \\n <p>Mean robot inaccuracy was 0.72 mm (SD 0.40; range 0.2–1.7 mm). Inaccuracies ≥1.5 mm were observed in 2/32 cases.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Conclusion</h3>\\n \\n <p>Our study confirms in vivo that the accuracy of the Neurolocate registration is compatible with the accuracy required for DBS procedures.</p>\\n </section>\\n </div>\",\"PeriodicalId\":50311,\"journal\":{\"name\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"volume\":\"20 1\",\"pages\":\"\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2023-12-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2610\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2610\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2610","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
Application accuracy of Neuromate robot-guided deep brain stimulation procedures using the non-invasive frameless Neurolocate registration system
Objective
to measure the in vivo application accuracy of Neuromate robot-assisted deep brain stimulation procedures (DBS) using the new, non-invasive, frameless Neurolocate registration method.
Methods
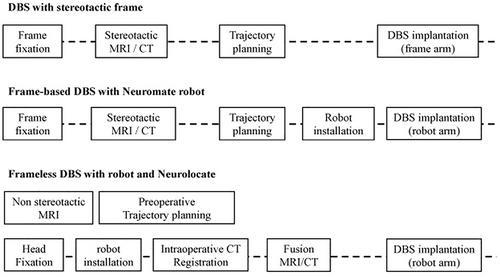
Neurolocate accuracy was measured in 17 patients undergoing DBS (32 leads). The registration was obtained by automatic recognition of the spatial location of the Neurolocate fiducials, fixed on the robot arm, on 3D intraoperative computerized tomography (CT) images relative to the patient's skull contours. Application accuracy was measured as the Euclidian distance between the points theoretically targeted on preoperative magnetic resonance imagingand the tip of the guiding tube visible on intraoperative CT images after merging images.
Results
Mean robot inaccuracy was 0.72 mm (SD 0.40; range 0.2–1.7 mm). Inaccuracies ≥1.5 mm were observed in 2/32 cases.
Conclusion
Our study confirms in vivo that the accuracy of the Neurolocate registration is compatible with the accuracy required for DBS procedures.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


