Mariana Rodrigues da Silva, Filipe Marques, Miguel Tavares da Silva, Paulo Flores
{"title":"一种新的踝关节复合体骨骼模型","authors":"Mariana Rodrigues da Silva, Filipe Marques, Miguel Tavares da Silva, Paulo Flores","doi":"10.1007/s11044-023-09955-z","DOIUrl":null,"url":null,"abstract":"<p>The talocrural and the talocalcaneal articulations collectively form the ankle joint complex of the human foot and are the focus of investigation of this work. The talocrural articulation enables plantarflexion and dorsiflexion, while the talocalcaneal articulation allows inversion and eversion of the foot. A comprehensive analysis of the literature suggests that the ankle joint complex is modeled in different manners considering approaches with varying complexity levels, which more or less accurately mimic its intrinsic anatomical features. Several studies assume that the foot articulates with the leg via the talocrural articulation only, which is modeled as a revolute joint. Other studies consider the movements allowed by both articulations and model the ankle joint complex as spherical, revolute, or classical universal joints. Most existing approaches do not consider sufficiently accurate anatomical modeling of this joint complex. Thus, this work presents a new skeletal model for the ankle joint complex of the human foot that considers the actual anatomy and movements of the talocrural and the talocalcaneal articulations. The proposed approach uses a modified universal joint, which incorporates a massless link to mimic the actual function of the talus bone. The developed formulation is compared with a model available in the literature, which uses a classical universal joint. The outcomes show that modeling the ankle joint complex as a modified universal joint allows a more realistic representation of the anatomy of the human foot. The main differences between the two joint models are observed in the mediolateral direction.</p>","PeriodicalId":49792,"journal":{"name":"Multibody System Dynamics","volume":"47 4","pages":""},"PeriodicalIF":2.4000,"publicationDate":"2023-12-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A new skeletal model for the ankle joint complex\",\"authors\":\"Mariana Rodrigues da Silva, Filipe Marques, Miguel Tavares da Silva, Paulo Flores\",\"doi\":\"10.1007/s11044-023-09955-z\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The talocrural and the talocalcaneal articulations collectively form the ankle joint complex of the human foot and are the focus of investigation of this work. The talocrural articulation enables plantarflexion and dorsiflexion, while the talocalcaneal articulation allows inversion and eversion of the foot. A comprehensive analysis of the literature suggests that the ankle joint complex is modeled in different manners considering approaches with varying complexity levels, which more or less accurately mimic its intrinsic anatomical features. Several studies assume that the foot articulates with the leg via the talocrural articulation only, which is modeled as a revolute joint. Other studies consider the movements allowed by both articulations and model the ankle joint complex as spherical, revolute, or classical universal joints. Most existing approaches do not consider sufficiently accurate anatomical modeling of this joint complex. Thus, this work presents a new skeletal model for the ankle joint complex of the human foot that considers the actual anatomy and movements of the talocrural and the talocalcaneal articulations. The proposed approach uses a modified universal joint, which incorporates a massless link to mimic the actual function of the talus bone. The developed formulation is compared with a model available in the literature, which uses a classical universal joint. The outcomes show that modeling the ankle joint complex as a modified universal joint allows a more realistic representation of the anatomy of the human foot. The main differences between the two joint models are observed in the mediolateral direction.</p>\",\"PeriodicalId\":49792,\"journal\":{\"name\":\"Multibody System Dynamics\",\"volume\":\"47 4\",\"pages\":\"\"},\"PeriodicalIF\":2.4000,\"publicationDate\":\"2023-12-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Multibody System Dynamics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11044-023-09955-z\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"MECHANICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multibody System Dynamics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11044-023-09955-z","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
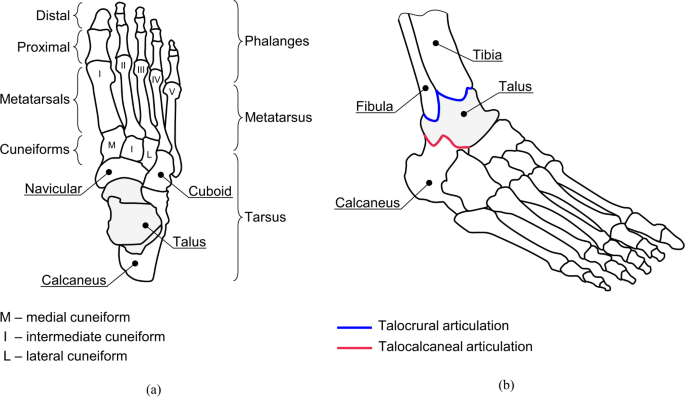
The talocrural and the talocalcaneal articulations collectively form the ankle joint complex of the human foot and are the focus of investigation of this work. The talocrural articulation enables plantarflexion and dorsiflexion, while the talocalcaneal articulation allows inversion and eversion of the foot. A comprehensive analysis of the literature suggests that the ankle joint complex is modeled in different manners considering approaches with varying complexity levels, which more or less accurately mimic its intrinsic anatomical features. Several studies assume that the foot articulates with the leg via the talocrural articulation only, which is modeled as a revolute joint. Other studies consider the movements allowed by both articulations and model the ankle joint complex as spherical, revolute, or classical universal joints. Most existing approaches do not consider sufficiently accurate anatomical modeling of this joint complex. Thus, this work presents a new skeletal model for the ankle joint complex of the human foot that considers the actual anatomy and movements of the talocrural and the talocalcaneal articulations. The proposed approach uses a modified universal joint, which incorporates a massless link to mimic the actual function of the talus bone. The developed formulation is compared with a model available in the literature, which uses a classical universal joint. The outcomes show that modeling the ankle joint complex as a modified universal joint allows a more realistic representation of the anatomy of the human foot. The main differences between the two joint models are observed in the mediolateral direction.
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


