基于边缘增强点对特征的三维刚体6DOF位姿估计
IF 18.3
3区 计算机科学
Q1 COMPUTER SCIENCE, SOFTWARE ENGINEERING
引用次数: 0
摘要
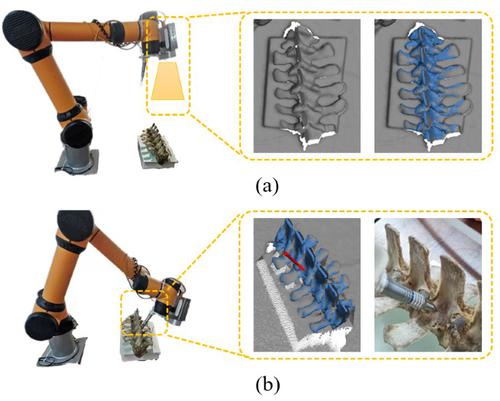
点对特征(PPF)被广泛用于6D姿态估计。本文提出了一种基于PPF框架的高效6D姿态估计方法。我们引入了一种目标明确的下采样策略,该策略侧重于边缘区域,以便对复杂几何图形进行有效的特征提取。提出了一种姿态假设验证方法,通过计算边缘匹配度来解决由于对称引起的模糊问题。我们对两个具有挑战性的数据集和一个真实世界收集的数据集进行了评估,证明了我们的方法在几何复杂、遮挡、对称物体的姿态估计方面的优越性。我们通过将其应用于模拟穿孔进一步验证了我们的方法。本文章由计算机程序翻译,如有差异,请以英文原文为准。
6DOF pose estimation of a 3D rigid object based on edge-enhanced point pair features
The point pair feature (PPF) is widely used for 6D pose estimation. In this paper, we propose an efficient 6D pose estimation method based on the PPF framework. We introduce a well-targeted down-sampling strategy that focuses on edge areas for efficient feature extraction for complex geometry. A pose hypothesis validation approach is proposed to resolve ambiguity due to symmetry by calculating the edge matching degree. We perform evaluations on two challenging datasets and one real-world collected dataset, demonstrating the superiority of our method for pose estimation for geometrically complex, occluded, symmetrical objects. We further validate our method by applying it to simulated punctures.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Computational Visual Media
Computer Science-Computer Graphics and Computer-Aided Design
CiteScore
16.90
自引率
5.80%
发文量
243
审稿时长
6 weeks
期刊介绍:
Computational Visual Media is a peer-reviewed open access journal. It publishes original high-quality research papers and significant review articles on novel ideas, methods, and systems relevant to visual media.
Computational Visual Media publishes articles that focus on, but are not limited to, the following areas:
• Editing and composition of visual media
• Geometric computing for images and video
• Geometry modeling and processing
• Machine learning for visual media
• Physically based animation
• Realistic rendering
• Recognition and understanding of visual media
• Visual computing for robotics
• Visualization and visual analytics
Other interdisciplinary research into visual media that combines aspects of computer graphics, computer vision, image and video processing, geometric computing, and machine learning is also within the journal''s scope.
This is an open access journal, published quarterly by Tsinghua University Press and Springer. The open access fees (article-processing charges) are fully sponsored by Tsinghua University, China. Authors can publish in the journal without any additional charges.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


