{"title":"全自动侧扫声纳同步定位和绘图框架","authors":"Jun Zhang, Yiping Xie, Li Ling, John Folkesson","doi":"10.1049/rsn2.12500","DOIUrl":null,"url":null,"abstract":"<p>Side-scan sonar is a lightweight acoustic sensor that is frequently deployed on autonomous underwater vehicles (AUVs) to provide high-resolution seafloor images. However, using side-scan images to perform simultaneous localization and mapping (SLAM) remains a challenge when there is a lack of 3D bathymetric information and discriminant features in the side-scan images. To tackle this, the authors propose a feature-based SLAM framework using side-scan sonar, which is able to automatically detect and robustly match keypoints between paired side-scan images. The authors then use the detected correspondences as constraints to optimise the AUV pose trajectory. The proposed method is evaluated on real data collected by a Hugin AUV, using as a ground truth reference both manually-annotated keypoints and a 3D bathymetry mesh from multibeam echosounder (MBES). Experimental results demonstrate that this approach is able to reduce drifts from the dead-reckoning system. The framework is made publicly available for the benefit of the community.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":null,"pages":null},"PeriodicalIF":1.4000,"publicationDate":"2023-11-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12500","citationCount":"0","resultStr":"{\"title\":\"A fully-automatic side-scan sonar simultaneous localization and mapping framework\",\"authors\":\"Jun Zhang, Yiping Xie, Li Ling, John Folkesson\",\"doi\":\"10.1049/rsn2.12500\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Side-scan sonar is a lightweight acoustic sensor that is frequently deployed on autonomous underwater vehicles (AUVs) to provide high-resolution seafloor images. However, using side-scan images to perform simultaneous localization and mapping (SLAM) remains a challenge when there is a lack of 3D bathymetric information and discriminant features in the side-scan images. To tackle this, the authors propose a feature-based SLAM framework using side-scan sonar, which is able to automatically detect and robustly match keypoints between paired side-scan images. The authors then use the detected correspondences as constraints to optimise the AUV pose trajectory. The proposed method is evaluated on real data collected by a Hugin AUV, using as a ground truth reference both manually-annotated keypoints and a 3D bathymetry mesh from multibeam echosounder (MBES). Experimental results demonstrate that this approach is able to reduce drifts from the dead-reckoning system. The framework is made publicly available for the benefit of the community.</p>\",\"PeriodicalId\":50377,\"journal\":{\"name\":\"Iet Radar Sonar and Navigation\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":1.4000,\"publicationDate\":\"2023-11-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12500\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iet Radar Sonar and Navigation\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12500\",\"RegionNum\":4,\"RegionCategory\":\"管理学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/rsn2.12500","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
摘要
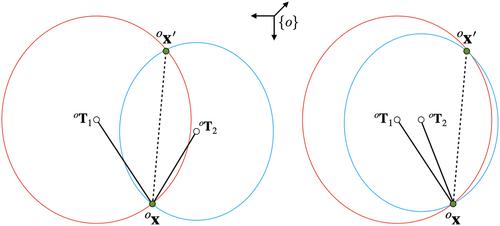
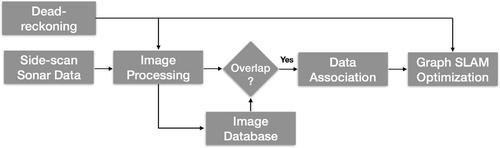
侧扫声纳是一种轻型声学传感器,经常部署在自动潜航器(AUV)上,以提供高分辨率的海底图像。然而,当侧扫图像中缺乏三维测深信息和判别特征时,利用侧扫图像执行同步定位和绘图(SLAM)仍然是一项挑战。为了解决这个问题,作者利用侧扫声纳提出了基于特征的 SLAM 框架,该框架能够自动检测配对侧扫图像之间的关键点并进行稳健匹配。然后,作者将检测到的对应关系作为优化 AUV 姿态轨迹的约束条件。所提出的方法在 Hugin AUV 采集的真实数据上进行了评估,使用了人工标注的关键点和多波束回声测深仪(MBES)的三维测深网格作为基本参考。实验结果表明,这种方法能够减少死点定位系统的漂移。为了社区的利益,该框架已公开发布。
A fully-automatic side-scan sonar simultaneous localization and mapping framework
Side-scan sonar is a lightweight acoustic sensor that is frequently deployed on autonomous underwater vehicles (AUVs) to provide high-resolution seafloor images. However, using side-scan images to perform simultaneous localization and mapping (SLAM) remains a challenge when there is a lack of 3D bathymetric information and discriminant features in the side-scan images. To tackle this, the authors propose a feature-based SLAM framework using side-scan sonar, which is able to automatically detect and robustly match keypoints between paired side-scan images. The authors then use the detected correspondences as constraints to optimise the AUV pose trajectory. The proposed method is evaluated on real data collected by a Hugin AUV, using as a ground truth reference both manually-annotated keypoints and a 3D bathymetry mesh from multibeam echosounder (MBES). Experimental results demonstrate that this approach is able to reduce drifts from the dead-reckoning system. The framework is made publicly available for the benefit of the community.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


