外向还是内向?基于gan的不同印象的人形上身手势生成
IF 3.8
2区 计算机科学
Q2 ROBOTICS
引用次数: 0
摘要
手势是身体语言的一种形式,它显著地影响着用户对人形机器人的感知。最近的数据驱动的协同语音手势方法已经成功地增强了生成手势的自然度。此外,与基于规则的系统相比,这些方法对于未见过的语音输入更具泛化性。然而,这些方法中的许多都不能直接影响人们对机器人的看法。主要的挑战在于构建具有不同印象标签的数据集以开发条件生成模型的复杂性。在我们之前的工作([22])中,通过基于gan的手势生成来控制机器人的印象。参见:智能机器人与系统国际会议论文集。IEEE, pp 9288-9295),我们引入了一种启发式自动标记方法,训练深度学习模型来控制机器人印象。我们在虚拟代理和人形机器人上验证了该模型的有效性。在本研究中,我们改进了人形机器人的运动重定向算法,并使用代表外向性不同方面的四个问题进行了用户研究。我们的研究结果表明,与以前的方法相比,我们的方法在控制类人机器人的外向性感知程度方面有了改进。此外,我们发现外向性的不同方面与运动统计有独特的相互作用本文章由计算机程序翻译,如有差异,请以英文原文为准。
Extrovert or Introvert? GAN-Based Humanoid Upper-Body Gesture Generation for Different Impressions
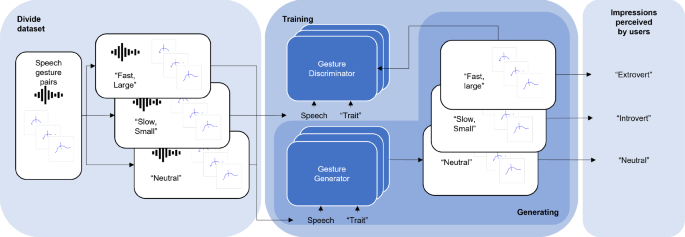
Abstract Gestures, a form of body language, significantly influence how users perceive humanoid robots. Recent data-driven methods for co-speech gestures have successfully enhanced the naturalness of the generated gestures. Moreover, compared to rule-based systems, these methods are more generalizable for unseen speech input. However, many of these methods cannot directly influence people’s perceptions of robots. The primary challenge lies in the intricacy of constructing a dataset with varied impression labels to develop a conditional generation model. In our prior work ([22]) Controlling the impression of robots via gan-based gesture generation. In:Proceedings of the international conference on intelligent robots and systems. IEEE, pp 9288-9295), we introduced a heuristic approach for automatic labeling, training a deep learning model to control robot impressions. We demonstrated the model’s effectiveness on both a virtual agent and a humanoid robot. In this study, we refined the motion retargeting algorithm for the humanoid robot and conducted a user study using four questions representing different aspects of extroversion. Our results show an improved capability in controlling the perceived degree of extroversion in the humanoid robot compared to previous methods. Furthermore, we discovered that different aspects of extroversion interact uniquely with motion statistics
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

International Journal of Social Robotics
ROBOTICS-
CiteScore
9.80
自引率
8.50%
发文量
95
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


