Christian Pek, Georg Friedrich Schuppe, Francesco Esposito, Jana Tumova, Danica Kragic
{"title":"空间:利用时空逻辑规范监测和规划机器人任务","authors":"Christian Pek, Georg Friedrich Schuppe, Francesco Esposito, Jana Tumova, Danica Kragic","doi":"10.1007/s10514-023-10145-1","DOIUrl":null,"url":null,"abstract":"<div><p>Many tasks require robots to manipulate objects while satisfying a complex interplay of spatial and temporal constraints. For instance, a table setting robot first needs to place a mug and then fill it with coffee, while satisfying spatial relations such as forks need to placed left of plates. We propose the spatio-temporal framework SpaTiaL that unifies the specification, monitoring, and planning of object-oriented robotic tasks in a robot-agnostic fashion. SpaTiaL is able to specify diverse spatial relations between objects and temporal task patterns. Our experiments with recorded data, simulations, and real robots demonstrate how SpaTiaL provides real-time monitoring and facilitates online planning. SpaTiaL is open source and easily expandable to new object relations and robotic applications.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1439 - 1462"},"PeriodicalIF":4.3000,"publicationDate":"2023-11-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10145-1.pdf","citationCount":"0","resultStr":"{\"title\":\"SpaTiaL: monitoring and planning of robotic tasks using spatio-temporal logic specifications\",\"authors\":\"Christian Pek, Georg Friedrich Schuppe, Francesco Esposito, Jana Tumova, Danica Kragic\",\"doi\":\"10.1007/s10514-023-10145-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Many tasks require robots to manipulate objects while satisfying a complex interplay of spatial and temporal constraints. For instance, a table setting robot first needs to place a mug and then fill it with coffee, while satisfying spatial relations such as forks need to placed left of plates. We propose the spatio-temporal framework SpaTiaL that unifies the specification, monitoring, and planning of object-oriented robotic tasks in a robot-agnostic fashion. SpaTiaL is able to specify diverse spatial relations between objects and temporal task patterns. Our experiments with recorded data, simulations, and real robots demonstrate how SpaTiaL provides real-time monitoring and facilitates online planning. SpaTiaL is open source and easily expandable to new object relations and robotic applications.</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1439 - 1462\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-11-03\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10145-1.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10145-1\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10145-1","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
SpaTiaL: monitoring and planning of robotic tasks using spatio-temporal logic specifications
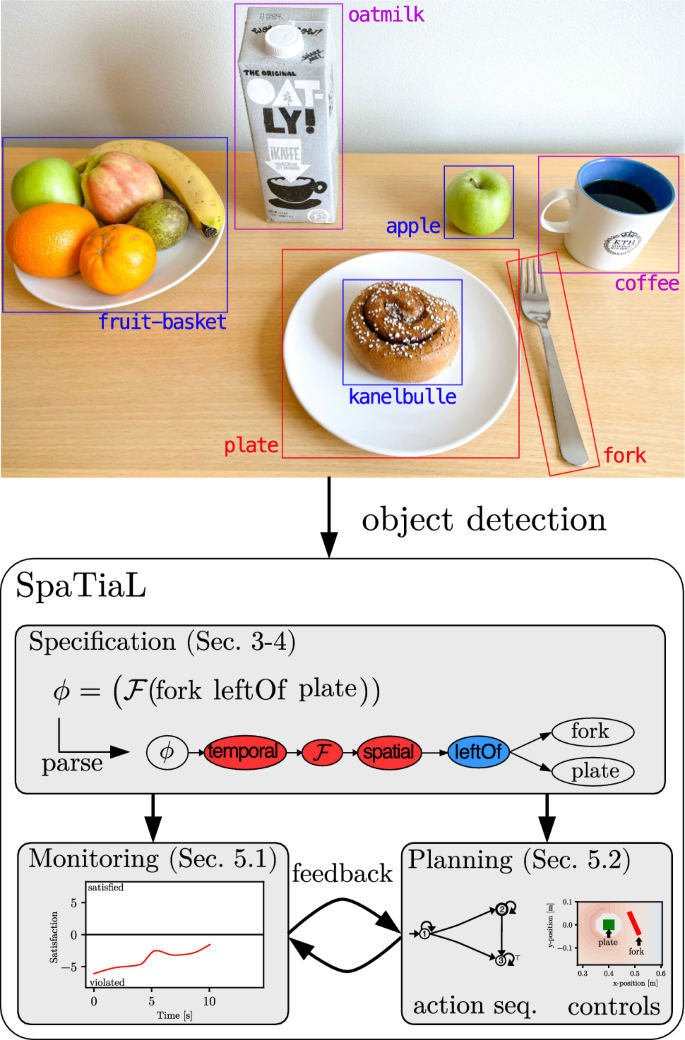
Many tasks require robots to manipulate objects while satisfying a complex interplay of spatial and temporal constraints. For instance, a table setting robot first needs to place a mug and then fill it with coffee, while satisfying spatial relations such as forks need to placed left of plates. We propose the spatio-temporal framework SpaTiaL that unifies the specification, monitoring, and planning of object-oriented robotic tasks in a robot-agnostic fashion. SpaTiaL is able to specify diverse spatial relations between objects and temporal task patterns. Our experiments with recorded data, simulations, and real robots demonstrate how SpaTiaL provides real-time monitoring and facilitates online planning. SpaTiaL is open source and easily expandable to new object relations and robotic applications.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


